


Instal·lacions d'automatismes programables industrials aplicats a motors
En tots els processos industrials les accions que executen els diferents mecanismes per fabricar o manipular un producte les fan els actuadors, que bàsicament són els motors elèctrics o els cilindres.
Aquests actuadors es poden utilitzar amb automatismes cablejats o programats. Els circuits de control són molt semblant, però a l’hora de fer els programes amb un autòmat programable, s’han de tenir en compte alguns detalls, ja que l’autòmat no té components electromecànics i els canvis d’estat es produeixen molt ràpidament, normalment en mil·lisegons, a diferència dels relés i la resta de components electromecànics, que per la inèrcia i les característiques mecàniques triguen una mica més. Això farà que en automatismes programables, en què sigui important que dos preactuadors no puguin funcionar a la vegada com és el cas dels dos contactors d’una inversió de gir d’un motor, s’hagin de posar enclavaments mecànics i elèctrics per garantir la seguretat.
De motors n'hi ha de moltes classes,...
… però els més utilitzats són els motors trifàsics de corrent altern, i de cilindres us podeu trobar els pneumàtics, que funcionen amb aire, i els hidràulics, que funcionen amb oli.
Automatismes programables amb motors de corrent altern
Per controlar un motor des d’un autòmat programable, el primer que s’ha de fer és connectar al PLC tots els elements que intervenen en el procés, i s’hauran de connectar com a entrades o com a sortides; els més freqüents en instal·lacions petites són:
- Entrades: polsadors, selectors, detectors, contactes auxiliars de tèrmics i disjuntors, etc.
- Sortides: contactors, electrovàlvules, pilots, sirenes, etc.
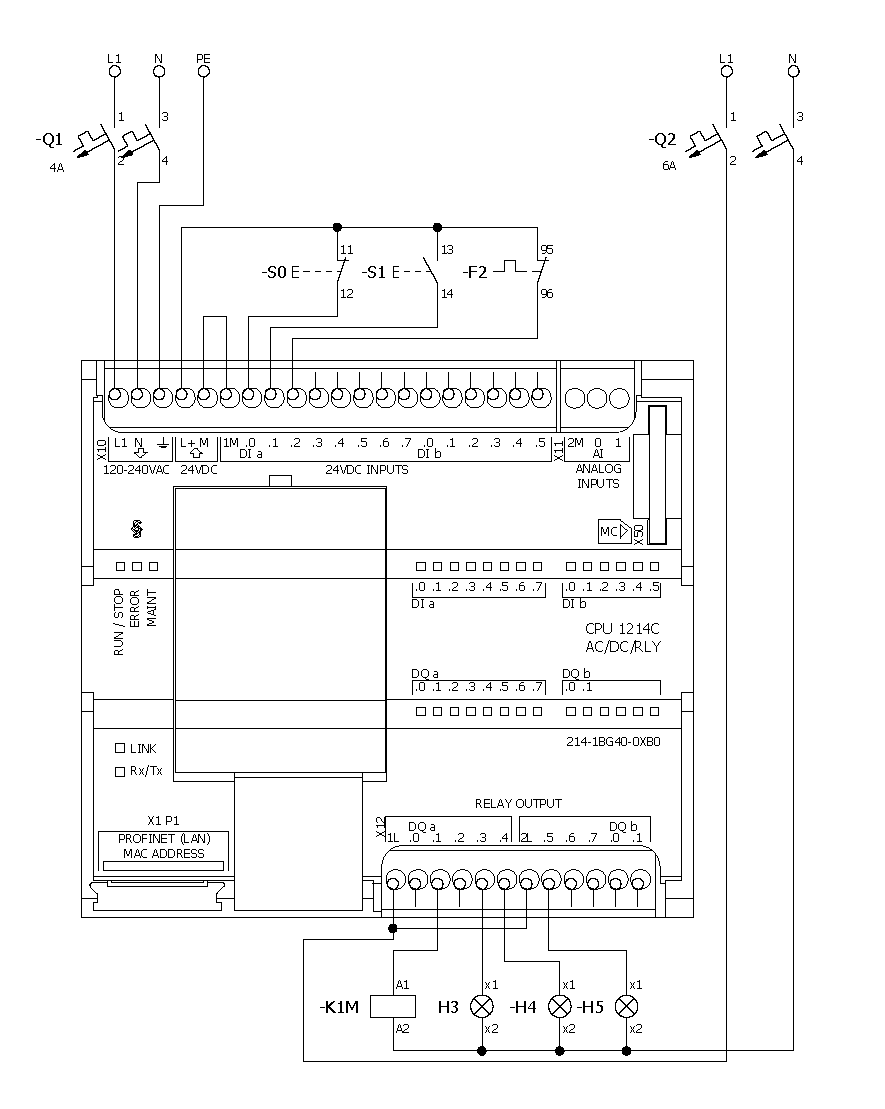
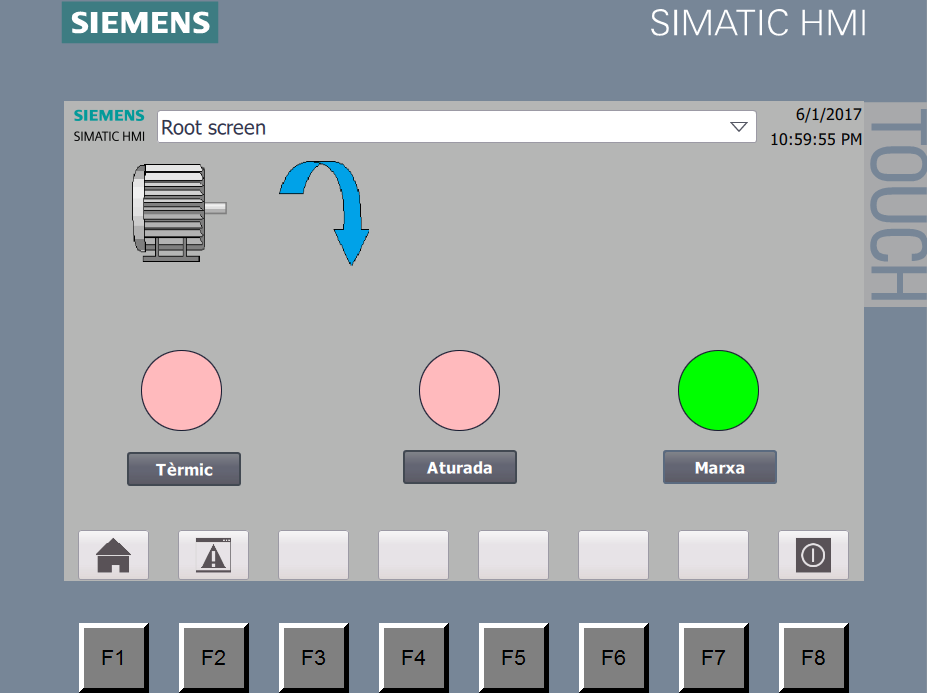
En la figura podeu veure les connexions de tots els elements que intervenen en el procés d’automatització que podeu simular amb l’SCADA de la figura realitzat per un HMI fent ús del programari TIA PORTAL V14 SP1. Fixeu-vos que els contactes del polsador d’aturada i el tèrmic són contactes normalment tancats NC i el del polsador de marxa és normalment obert NO.
Quan hi ha un contacte normalment tancat NC connectat a l’entrada d’un PLC, heu de tenir en compte que estant sense activar arriba senyal elèctric al PLC i, per tant, l’entrada corresponent té valor lògic 1 en repòs.
El programari TIA PORTAL V14 SP1 permet dissenyar SCADAs per HMIs facilitant l’interacció entre els operaris i els sistemes automàtics.
En la figura podeu veure l’SCADA d’una instal·lació automatitzada molt senzilla (feta amb el programari TIA PORTAL V14 SP1), formada per un motor amb tres pilots de senyalització, els polsadors d’aturada i marxa i el relé tèrmic de protecció.

Comprovació del funcionament de circuits amb automatismes en TIA PORTAL V14 SP1
Abans de carregar els programes dels PLC a la instal·lació real és convenient comprovar-ne el funcionament. Això es pot fer de diverses maneres. Si es vol provar el programa parcialment el programa dissenyat el que es pot fer és carregar el programa a un PLC de prova que tingui interruptors connectats simulant les entrades, però si es vol provar tot el programa de manera que s’aproximi al màxim al funcionament real del sistema, la manera més segura és utilitzar el simulador S7-PLCSIM V14 que inclou el paquet de software TIA PORTAL V14 SP1.
En la secció “Annexos” del web d’aquest mòdul podeu trobar l’arxiu HMI_MOTOR_01.zap14 corresponent al disseny de l’SCADA.
El programari TIA PORTAL V14 SP1 el trobareu a la part web del mòdul.
Podeu comprovar el funcionament de programes fets amb el programari TIA PORTAL V14 SP1 corresponents a instal·lacions automàtiques simulant les seqüències amb els SCADAs corresponents.
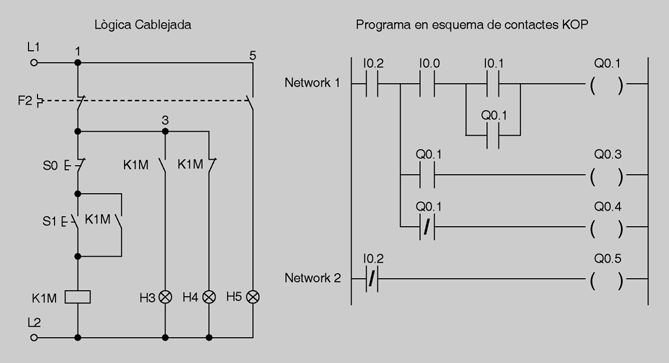
En la figura teniu l’esquema de lògica cablada i el programa en esquemes de contactes corresponent a la posada en marxa d’un motor III amb polsadors de marxa-aturada i protecció contra sobreintensitat mitjançant relé tèrmic amb bombetes de senyalització de motor aturat sense avaria, motor en marxa i motor aturat per disparament del tèrmic (a la figura ja al TIA PORTAL).

Per realitzar un programa de control amb el programari TIA PORTA V14 SP1 i comprovar-ne el seu funcionament fent ús d’un SCADA per a un HMI, heu de seguir el passos següents:
1) Desarxivar el projecte.
Desarxiveu el projecte de TIA PORTAL V14 SP1 que ja conté preprogramat per els professors de l’IOC l’SCADA HMI del sistema automàtic que volem controlar.
Inicieu el programari TIA PORTAL V14 SP1.
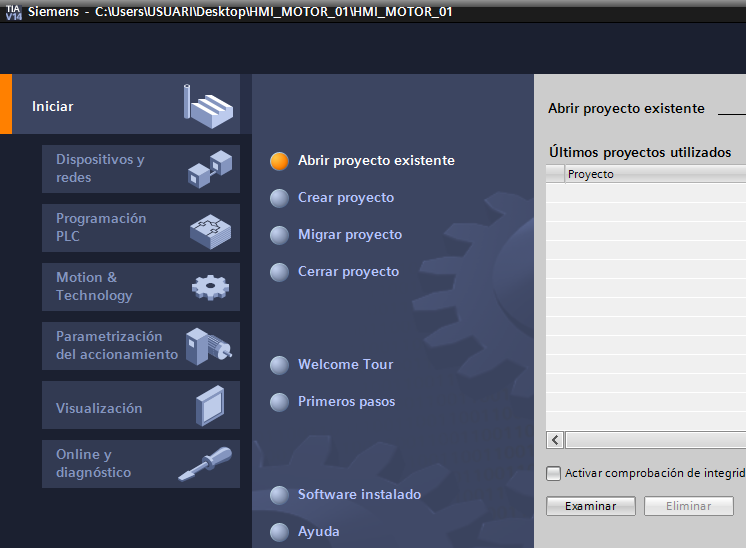
Un cop el programa s’ha carregat veureu el que s’anomena Vista del portal que és la pantalla que podeu observar en la figura. En aquest punt farem clic en l’enllaç Vista del proyecto.
Seleccioneu dins del menú Proyecto l’opció Desarchivar tal i com podeu observar en la figura.

A continuació s’obrirà una finestra emergent que us permetrà navegar per el vostre PC fins localitzar l’arxiu comprimit .zap14 que previament haureu descarregat dels annexos dels materials web de l’IOC.
Un cop seleccionat us demanarà en quina carpeta del vostre PC voleu descomprimir l’arxiu .zap14. Ubique el lloc de la descompressió de l’arxiu i accepteu.
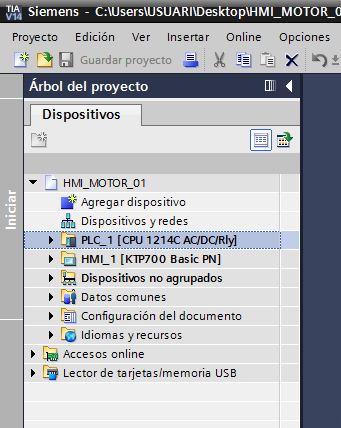
Us apareixerà una pantalla com la que podeu observar a la figura. En ella podeu observar que de l’arbre del projecte, entre d’altres elements apareixen el PLC (PLC_1 [CPU 1214C AC/DC/Rly]) que serà el dispositiu que gestionarà el control del sistema automàtic a partir de la programació que en ell realitzem i l’HMI (HMI_1 [KTP700 Basic PN]) que és l’element que ens permetrà interaccionar amb el sistema que volem automatitzar i controlar.
2) Entrades i Sortides del PLC.
Per tal d’utilitzar els noms simbòlics de les entrades i sortides que controlarà el nostre PLC en l’automatització, el que hem de fer a continuació és obrir la taula de variables per defecte que trobarem dins de la carpeta Variables PLC que penja del nostre controlador. En el nostre cas és el PLC_1 [CPU 1214C AC/DC/Rly].
En la taula de variables establim la relació entre els noms dels sensors/actuadors i les entrades/sortides que els supervisen i controlen. Podem observar com quedaria en el nostre automatisme en la figura.
Fixeu-vos que enlloc d’utilitzar adreces d’entrades per al tèrmic i els pulsadors, hem de fer servir marques. Això és degut a que al no estarem treballant directament sobre el sistema físic (tèrmic i pulsadors reals), sinò que tant el tèrmic com els pulsadors de marxa i aturada seran botons en un HMI.

Recordeu que estem utilitzant un aplicatiu actual, tal i com es fa en un control industrial real. Això vol dir que quan es programen els HMIs a l’industria també s’han d’assignar marques als botons de la pantalla, mentre que les adreces de les entrades físques del controlador s’assignen als pulsadors i contactes, cablejats al PLC. D’aquesta manera es pot realitzar el control de l’automatització de forma indistinta tant desde pulsadors físics com desde botons en una pantalla d’HMI.
3) Elaborar el Programa del PLC.
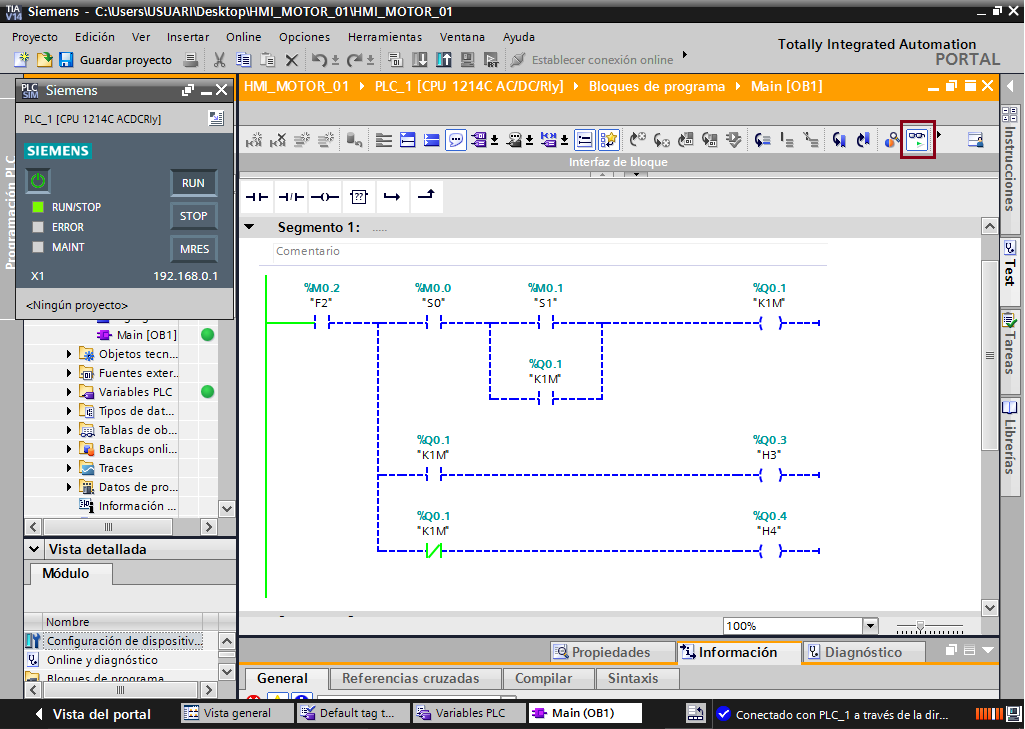
En l’arbre del projecte, dins del PLC_1 [CPU 1214 AC/DC/Rly]), entre d’altres elements hi ha la carpeta que conté els blocs de programa, i dintre d’aquesta hi trobem el bloc Main [OB1]. Aquest correspon al bloc principal de programació que s’executa de forma recurrent seguint el que s’anomena Cicle d’Scan del PLC. Obriu, doncs, el bloc Main [OB1]. Apareixerà en pantalla el que podeu observar en la figura.

Per tal de reaitzar la programació podeu arrastrar els elements de programació que necessiteu a la zona del segment que us convingui desde les carpetes d’instruccions que tindreu a l’esquerra del monitor un cop hagueu obert l’OB1 o bé els elements més bàsics els podeu trobar a la part superior de dit OB.
4) Compilar el Programa.
Un cop heu acabat de escriure el programa, abans de carregar-lo en el PLC heu de compilar-lo per tal de que no hagueu comés algún error. En la figura podeu veure enmarcada en color vermell la icona que executa l’ordre de compilació.

Veureu que un cop acabada la compilació estarà activa en la part inferior la pestanya Compilar i en ella podreu observar si s’han trobat errors.
De vegades pot ser necessari fer una compilació, no només del programa elaborat, sinò que també s’ha de realitzar de la configuració de hardware, dispositius connectats al PLC, etc. En aquests casos realitzarem la compilació situant-nos en l’arbre de projecte, a sobre del nostre controlador i prement el botó dret del ratolí. Aquesta acció ens obrirà un menú desplegable que entre altres opccions trobarem Compilar i en el següent desplegable trobareu Compilar Hardware y Software. Aquesta opció ens permetrà detectar errors en qualsevol punt de la configuració i programació del nostre sistema de control. En la figura en podeu veure l’ubicació.

5) PLC Virtual.
El paguet de software TIA PORTAL V14 SP1 conté també un aplicatiu anomenat PLC SIM que un cop instal·lat queda integrat en el propi TIA PORTAL. Aquest programari permet realitzar la simulació del programes que es realitzin i és una bona eina per tal de poder depurar-los abans de llançar-los al sistema real. Nosaltres el l’utilitzarem per simular el programa que hem realitzat. En la figura podeu identificar enmarcat en color vermell la icona del PLC virtual.

Un cop premeu la icona del simulador s’iniciarà l’operació de càrrega, figura.
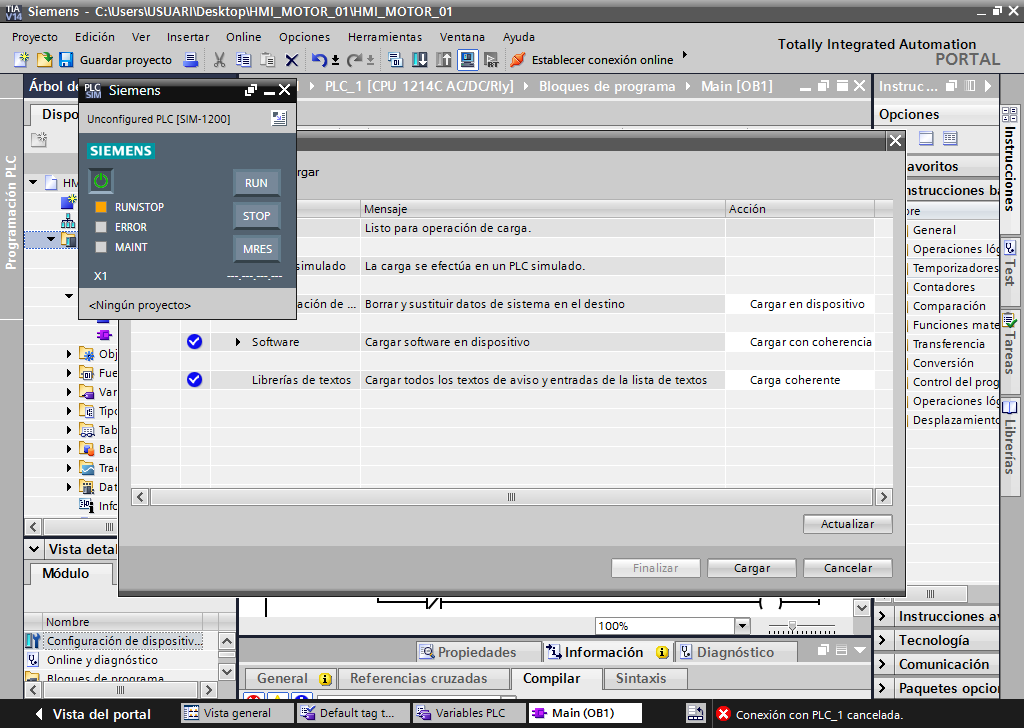
Marqueu l’opció d’arrencar el dispositiu i finalitzeu.
6) Visualització del Programa.
El TIA PORTAL V14 SP1 permet realitzar la visualització de l’estat del sistema mitjançant l’observació de l’estat dels diferents elements de programació i seqüències de control. Per poder realitzar dita visualització ens hem de posar en mode d’observació. Per fer això hem de prèmer la icona que té unes ulleres i un triangle verd i que trobarem en el bloc que volguem observar. En el nostre cas es tracta del bloc principal, Main[OB1]. En la figura podreu observar la icona i el sistema en mode d’observació.
7) Forçar Variables.
Quan teniu el programa en mode d’observació teniu l’opció de canviar l’estat de les variables que formen el programa, observant així com aquest evoluciona d’acord amb la programació que li hem implementat. El forçat de variables el realitzareu situant el ratolí sobre la variable que voleu modificar i prement el botó dret d’aquest. A continuació, se us obrirà un menu contextual en el qual podreu escollir forçar. Podeu veure en la figura la ubicació de la instrucció forçar.

7) HMI.
Per tal de poder interactuar amb el sistema automàtic tal i com ho fariem en un sistema físic real, aprofitem un HMI que actui de la mateixa forma. Penseu que actualment la industria està cada cop més dotada de pantalles HMI per tal de facilitar la interacció entre els sistemes automàtics i els operaris que hi treballen. És a dir, la utilització d’aquest recurs no s’allunya molt de com ho podriem estar fent en un cas real.
El disseny i programació de l’HMI ja està realitzada en el projecte, per tant, només ens cal executar-ne la simulació. Les variables del PLC ja estan vinculades a les diferents accions que realitzaran els gràfics de l’HMI.
Per posar en funcionament la simulació de l’HMI hem de situar-nos en l’arbre de projecte a sobre del dispositiu HMI_1 [KTP700 Basic PN] i seleccionar-lo. Un cop seleccionat només queda prémer la icona de simulació que apareixia a la figura.
A la figura podeu observar l’RT Simulator que simula l’HMI.
Connexions d'entrades i sortides
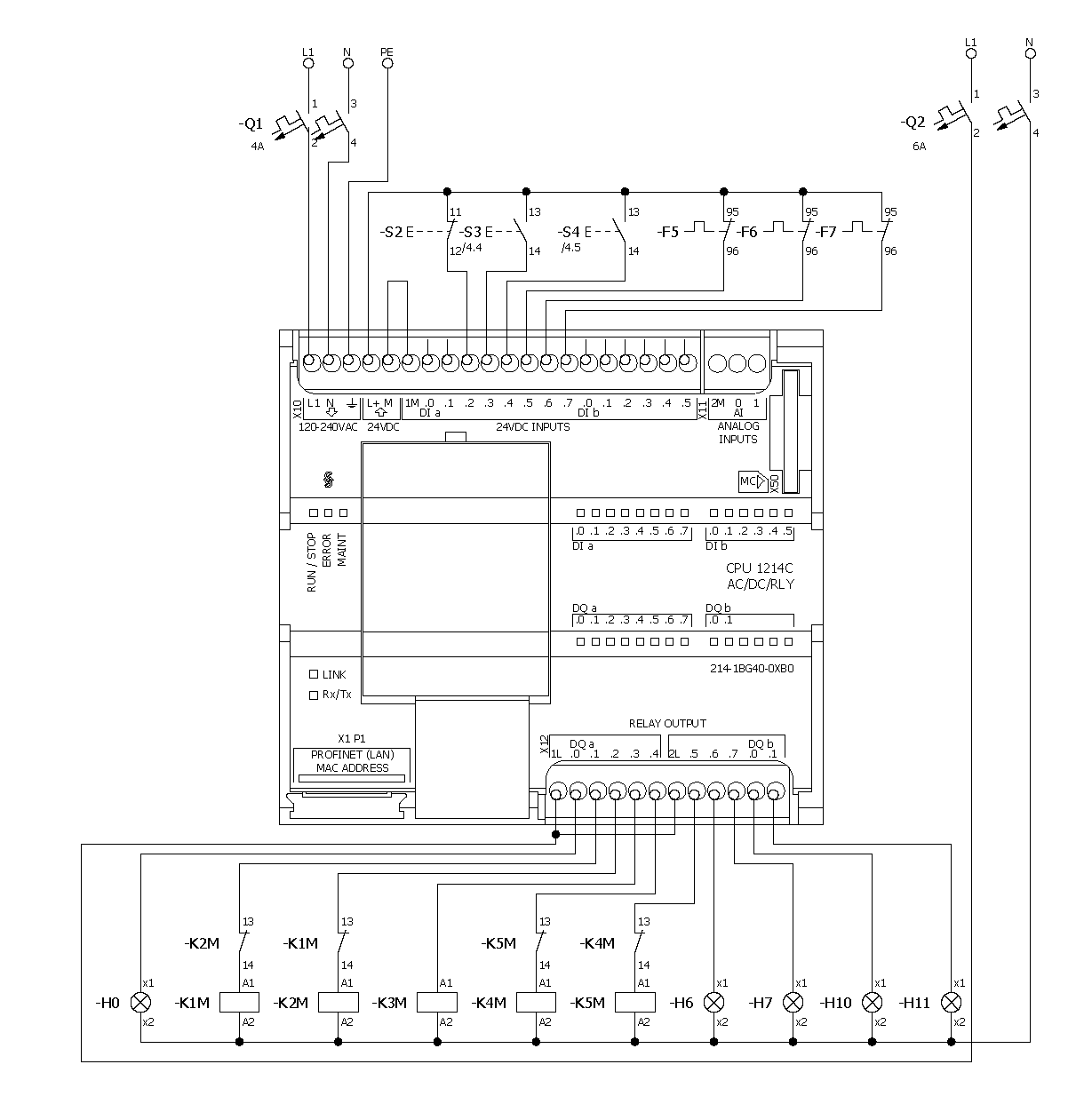
Tots els models d’autòmats fan la connexió d’entrades i sortides de manera molt semblant: sempre hi ha un fil de línia comú per a totes les entrades o sortides, l’altre fil de línia que alimenta la targeta corresponent d’entrades o sortides i un fil que va de cada sensor o actuador, és a dir, de cada entrada o sortida, a un born de connexió de l’autòmat, que en determina el paràmetre. En la figura teniu un exemple de connexió d’entrades i sortides a un PLC que correspon als elements d’una instal·lació que està simulada en la maqueta representada en la figura.
Ara feu l’activitat “Posada en marxa d’un motor III”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
Observeu que hi ha unes bobines que tenen una sèrie de contactes negats d’altres bobines; aquests contactes reben el nom d’enclavament elèctric, i es posen per assegurar que dues bobines, normalment de contactors, no puguin funcionar mai a la vegada.
En la secció “Annexos” del web d’aquest mòdul podeu trobar l’arxiu HMI_MOTOR_02.zap14.
Per evitar possibles curtcircuits, quan dos contactors fan la inversió de gir o l’arrencada estrella-triangle d’un motor, s’utilitzen els enclavaments elèctrics, a més dels enclavaments mecànics.
En la figura podeu veure el disseny d’un HMI fet amb el programari TIA PORTAL V14 SP1, que conté un motor, una sèrie d’elements de protecció, polsadors i bombetes de senyalització, que són les mateixes que estan connectades al PLC representat en la figura; podeu comprovar en aquest SCADA el funcionament dels programes que feu amb el programari TIA PORTAL V14 SP1.
Inversió de gir d'un motor III passant per zero
En la figura podeu veure l’esquema de potència i comandament de la posada en marxa d’un motor III amb inversió del sentit de gir passant per zero. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar el següent:
- Quan dispari el relé tèrmic de protecció F5, obrirà el contacte 95-96 i tallarà el senyal elèctric a tot el circuit de comandament; tancarà el contacte 97-98 i encendrà la bombeta de senyalització H0.
- Quan està en marxa un contactor obre el contacte 21-22 i impedeix que es pugui posar en marxa l’altre contactor.
- El contacte 13-14 de cada contactor realimenta el circuit una vegada que es deixa d’accionar el polsador de marxa.
- Per canviar el sentit de gir del motor, s’ha d’accionar el polsador d’aturada S2 i quan no funciona cap contactor ja es pot donar l’ordre de marxa amb el sentit de gir que es vulgui.
- Els contactes 43-44 de cada contactor accionen una bombeta de senyalització que indica el sentit de gir del motor.
- La bombeta de senyalització H10 s’encén quan no funciona el motor per mitjà dels contactes 31-32 de cada contactor.
- Com que els contactes del tèrmic F5 i del polsador d’aturada S2 connectats al PLC són NC, és a dir, normalment tancats, en repòs l’entrada corresponent té valor lògic 1 i, per tant, els contactes que estan tancats en l’esquema s’han de programar oberts, i els oberts negats.

Inversió de gir d'un motor III sense passar per zero
En la figura podeu veure l’esquema de potència i comandament de la posada en marxa d’un motor III amb inversió del sentit de gir sense passar per zero. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar el següent:
Ara feu l’activitat “Inversió de gir d’un motor III passant per zero”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- Quan dispari el relé tèrmic de protecció F5, obrirà el contacte 95-96 i tallarà el senyal elèctric a tot el circuit de comandament, i quan tanqui el contacte 97-98 encendrà la bombeta de senyalització H0.
- Quan un contactor està en marxa obre el contacte 21-22 i impedeix que els dos contactors puguin funcionar a la vegada.
- Quan accioneu un polsador de marxa, aquest tanca el contacte 3-4 i dóna l’ordre de marxa al contactor corresponent, però a la vegada obre el contacte 1-2 i desconnecta l’altre contactor; així doncs, el canvi de sentit de gir és automàtic, i no cal accionar el polsador d’aturada S2. Cada vegada que accioneu un polsador el motor gira en el sentit corresponent i si accioneu els dos polsadors de marxa a la vegada el motor no funciona, ja que estan oberts els dos contactes 1-2 dels polsadors.
- El contacte 13-14 de cada contactor realimenta el circuit una vegada que es deixa d’accionar el polsador de marxa.
- Els contactes 43-44 de cada contactor accionen una bombeta de senyalització que indica el sentit de gir del motor.
- La bombeta de senyalització H10 s’encén quan no funciona el motor per mitjà dels contactes 31-32 de cada contactor.
- Com que els contactes del tèrmic F5 i del polsador d’aturada S2 connectats al PLC són NC, és a dir, normalment tancats, en repòs l’entrada corresponent té valor lògic 1 i, per tant, els contactes que estan tancats en l’esquema s’han de programar oberts, i els oberts negats.

Arrencada d'un motor III temporitzat a la connexió
En la figura podeu veure l’esquema de potència i comandament per a l’arrencada d’un motor III temporitzat a la connexió. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar-ne que:
Ara feu l’activitat “Inversió de gir d’un motor III sense passar per zero”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- El polsador d’aturada i marxa no acciona directament el contactor, sinó que actua sobre el relé K1.
- Quan el relé està accionat es posa en marxa el temporitzador i una vegada transcorregut el temps programat tanca el contacte 15-18 del temporitzador i es posa en marxa el contactor.
- Quan el contactor s’ha posat en marxa obre el contacte 21-22 i desconnecta el relé que, a la vegada, mitjançant el contacte 23-24, desconnecta el temporitzador.
- La bombeta H6 indica el funcionament del relé, la H7 del temporitzador i la H10 del contactor.
- Quan dispari el relé tèrmic de protecció F5, obrirà el contacte 95-96 i tallarà el senyal elèctric a tot el circuit de comandament, i quan tanqui el contacte 97-98 encendrà la bombeta de senyalització H0.
- Com que els contactes del tèrmic F5 i del polsador d’aturada S2 connectats al PLC són NC, és a dir, normalment tancats, en repòs l’entrada corresponent té valor lògic 1 i, per tant, els contactes que estan tancats en l’esquema s’han de programar oberts, i els oberts negats.

Arrencada d'un motor III temporitzat a la desconnexió
En la figura podeu veure l’esquema de potència i comandament per a l’arrencada d’un motor III temporitzat a la desconnexió. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar el següent:
Ara feu l’activitat “Arrencada d’un motor III temporitzat a la connexió”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- El polsador d’aturada-marxa no acciona directament el contactor, sinó que actua sobre el relé K1.
- Quan el relé està accionat, mitjançant el contacte 33-34 acciona el temporitzador, que tanca immediatament el contacte 1-3 i connecta el contactor; per tant, el contactor es posa en marxa en el mateix moment que es dóna l’ordre amb el polsador de marxa S3.
- Quan s’acciona el polsador d’aturada S2, es desconnecta el relé, obre el contacte 33-34 i desconnecta la bobina del temporitzador, però el seu contacte 1-3 continua tancat i, per tant, el contactor segueix en marxa; en aquest moment comença a comptar el temps programat i quan ha transcorregut aquest temps obre el contacte 1-3 i desconnecta el contactor.
- La bombeta H6 indica el funcionament del relé, la H7 del temporitzador i la H10 del contactor.
- Quan dispari el relé tèrmic de protecció F5, obrirà el contacte 95-96 i tallarà el senyal elèctric a tot el circuit de comandament, i quan tanqui el contacte 97-98 s’encendrà la bombeta de senyalització H0.
- Com els contactes del tèrmic F5 i del polsador d’aturada S2 connectats al PLC són NC, és a dir, normalment tancats, en repòs l’entrada corresponent té valor lògic 1 i, per tant, els contactes que estan tancats en l’esquema s’han de programar oberts i els oberts negats.

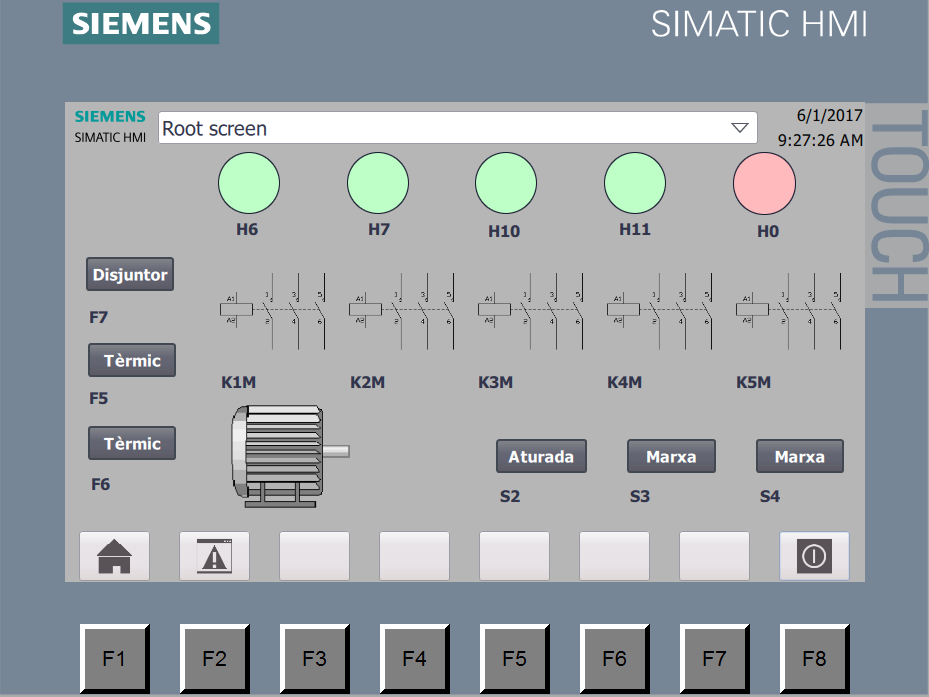
Arrencada d'un motor III en estrella-triangle
En la figura podeu veure l’esquema de potència i comandament per a l’arrencada d’un motor III en estrella-triangle. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar el següent:
Ara feu l’activitat “Arrencada d’un motor III temporitzat a la desconnexió”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- El motor està protegit mitjançant un disjuntor protector de motor amb el contacte 13-14 NO, normalment obert, que es tanca quan s’acciona i que obre quan dispara; per tant, aquest s’ha de programar obert i el contacte tancat 11-12 negat.
- Quan accioneu el polsador de marxa es connecta el contactor general K1M, el temporitzador K1T i el contactor estrella K5M; en aquest moment el temporitzador comença a comptar el temps programat i quan aquest ha finalitzat canvia l’estat dels seus contactes i obre el 15-16, que desconnecta el contactor K5M, i tanca el 15-18, que connecta el contactor K4M, de manera que deixa al motor funcionant en triangle fins que s’accioni el polsador d’aturada S2.
- Els contactors K4M i K5M tenen l’enclavament elèctric mitjançant els contactes 21-22.
- La bombeta H6 indica el funcionament del contactor general, la H7 del temporitzador, la H10 del contactor d’estrella i la H11 del contactor triangle.
- Quan dispari el disjuntor protector de motor F7, s’obrirà el contacte 13-14 i es tallarà el senyal elèctric a tot el circuit de comandament, i quan es tanqui el contacte 11-12 s’encendrà la bombeta de senyalització H0.

Arrencada d'un motor III en estrella-triangle amb inversió del sentit de gir
En la figura podeu veure l’esquema de potència i comandament per a l’arrencada d’un motor III en estrella-triangle amb inversió del sentit de gir. El programa que s’ha de confeccionar per fer-ne a terme el control des d’un PLC correspon a l’esquema de comandament, i cal destacar el següent:
Ara feu l’activitat “Arrencada d’un motor III en estrella-triangle”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- El motor està protegit mitjançant un disjuntor protector de motor amb el contacte 13-14 NO, normalment obert, que es tanca quan s’acciona i que s’obre quan dispara el disjuntor; per tant, aquest s’ha de programar obert i el contacte tancat 11-12 negat.
- Quan accioneu un dels polsadors de marxa S3 o S4 es connecta el contactor K1M o K2M i gira el motor en el sentit accionat; mitjançant els contactes 43-44 es connecta el temporitzador i el contactor estrella K5M, el temporitzador comença a comptar i quan finalitza el temps programat obre el contacte 31-32 i desconnecta el contactor K5M, i tanca el contacte 15-18 i connectant el contactor K4M, de manera que deixa el motor funcionant en triangle.
- Els contactors K1M i K2M estan enclavats mecànicament, ja que fan la inversió de gir, i K4M i K5M també fan la connexió estrella-triangle.
- Les bombetes H6 i H7 indiquen el sentit de gir del motor, la H10 i H11 si el motor està en connexió estrella o triangle.
- Quan dispari el disjuntor protector de motor F7, obrirà el contacte 1314 i tallarà el senyal elèctric a tot el circuit de comandament, i quan tanqui el contacte 11-12 encendrà la bombeta de senyalització H0.

Arrencada d'un motor III mitjançant resistències rotòriques
En la figura podeu veure l’esquema de potència i comandament per a l’arrencada d’un motor III mitjançant resistències rotòriques. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar el següent:
Ara feu l’activitat “Arrencada d’un motor III en estrella-triangle amb inversió del sentit de gir”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- El motor està protegit mitjançant un disjuntor protector de motor amb el contacte 13-14 NO, normalment obert, que es tanca quan s’acciona i que obre quan dispara; per tant, aquest s’ha de programar obert i el contacte tancat 11-12 negat.
- Quan accioneu el polsador de marxa S3 es connecta el contactor general K1M i el temporitzador K1T, i en aquest moment el debanat del rotor funciona amb les resistències R1 i R2 en sèrie; quan ha transcorregut el temps programat en K1T, per mitjà del contacte 15-18 es connecta el contactor K3M i el temporitzador K2T, i en aquest moment queden anul·lades les resistències R1 i el debanat del rotor funciona en sèrie amb les resistències R2; quan ha transcorregut el temps programat en K2T es tanca el contacte 15-18 i es connecta el contactor K5M, i el debanat del rotor funciona en curtcircuit sense cap resistència. A la vegada, el contactor K5M obre el contacte 21-22 i desconnecta els temporitzadors i el contactor K3M, i es realimenta pel contacte 13-14.
- La bombeta H6 indica que està connectat el contactor K1M, la H10 que ho està K3M i la H11 que ho està K5M.
- Quan dispari el disjuntor protector de motor F7, obrirà el contacte 13-14 i tallarà el senyal elèctric a tot el circuit de comandament, i quan tanqui el contacte 11-12 s’encendrà la bombeta de senyalització H0.

Arrencada d'un motor III mitjançant resistències rotòriques i amb inversió del sentit de gir
En la figura podeu veure l’esquema de potència i comandament per a l’arrencada d’un motor III mitjançant resistències rotòriques i amb inversió de gir. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar el següent:
Ara feu l’activitat “Arrencada d’un motor III mitjançant resistències rotòriques”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- El motor està protegit mitjançant un disjuntor protector de motor amb el contacte 13-14 NO, normalment obert, que es tanca quan s’acciona i que obre quan dispara; per tant, aquest s’ha de programar obert i el contacte tancat 11-12 negat.
- Quan accioneu un dels polsadors de marxa S3 o S4 es connecta el contactor K1M o K2M i gira el motor en el sentit accionat; mitjançant els contactes 43-44 es connecta el temporitzador K1T, i quan ha transcorregut el temps programat per mitjà del contacte 15-18 es connecta el contactor K3M i el temporitzador K2T; quan ha transcorregut el temps programat en K2T es tanca el contacte 15-18 i es connecta el contactor K5M, que obre el contacte 21-22 i desconnecta els temporitzadors i el contactor K3M, que es realimenta pel contacte 13-14.
- Les bombetes H6 i H7 indiquen el sentit de gir del motor, la H10 que estan connectades les resistències R1 i R2 i la H11 que només estan connectades les resistències R2.
- Quan dispari el disjuntor protector de motor F7, obrirà el contacte 1314 i tallarà el senyal elèctric a tot el circuit de comandament, i quan tanqui el contacte 11-12 s’encendrà la bombeta de senyalització H0.

Arrencada d'un motor Dahlander
En la figura podeu veure l’esquema de potència i comandament per a l’arrencada d’un motor Dahlander, que pot funcionar a dues velocitats diferents. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar el següent:
Ara feu l’activitat “Arrencada d’un motor III mitjançant resistències rotòriques i amb inversió del sentit de gir”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- El motor està protegit mitjançant dos relés tèrmics de protecció: F6 per a la velocitat lenta i F5 per a la ràpida.
- Si accioneu el polsador S3, mitjançant el contacte 3-4 es connecta el contactor K5M, que posa en marxa el motor a velocitat lenta.
- Si accioneu el posador S4, mitjançant el contacte 3-4 es connecten els contactors K4M i K3M, que posen en marxa el motor a velocitat ràpida.
- Observeu que el polsador de marxa lenta S3 té un contacte normalment tancat 1-2 en sèrie amb el circuit de la marxa ràpida, i impedeix que es pugui accionar el circuit de marxa ràpida mentre es dóna l’ordre de marxa lenta. A l’inrevés passa el mateix: quan accioneu el polsador de marxa ràpida S4, s’obre el contacte 1-2 en el circuit de marxa lenta.
- Els contactes 21-22 de K4M i K5M actuen d’enclavament elèctric i impedeixen que aquests contactors puguin funcionar a la vegada.
- Les bombetes H7 i H11 indiquen la velocitat a la qual gira el motor i la H0 es connecta quan es disparen qualsevol dels dos relés tèrmics de protecció.

Inversió del sentit de gir d'un motor Dahlander
En la figura podeu veure l’esquema de potència i comandament per a l’arrencada d’un motor Dahlander, que pot funcionar a dues velocitats diferents amb inversió del sentit de gir. El programa que s’ha de confeccionar per fer-ne el control des d’un PLC correspon a l’esquema de comandament, i cal destacar-ne el següent:
Ara feu l’activitat “Arrencada d’un motor Dahlander”, que trobareu en la secció “Activitats” del web d’aquest mòdul.
- El motor està protegit mitjançant dos relés tèrmics de protecció, F6 per a la velocitat lenta i F5 per a la ràpida.
- El polsador S3 connecta el contactor K1M, que fa que el motor giri a l’esquerra, i el S4 connecta K2M, que fa que giri a la dreta.
- Els contactes 21-22 dels contactors K1M i K2M actuen d’enclavament elèctric; per tant, per canviar el sentit de gir s’ha d’accionar abans el posador d’aturada S2.
- El polsador S5 connecta el contactor K5M, que fa que el motor giri a marxa lenta, i el polsador S6 connecta els contactors K4M i K3M, que fan que el motor giri a marxa ràpida.
- Els circuits de selecció del sentit de gir i el de velocitat del motor són independents: es pot seleccionar primer qualsevol dels dos, però el motor no es posa en marxa fins que no s’hagi seleccionat un sentit de marxa i una velocitat.
- Les bombetes de senyalització H6 i H7 indiquen el sentit de gir, les bombetes H10 i H11 la velocitat del motor i la H0 el disparament de qualsevol dels dos relés tèrmics de protecció.
