


Maquinari i funcionament intern dels autòmats programables
Abans d’estudiar els autòmats programables, heu de tenir clar què són i per a què s’utilitzen. Per aclarir aquests conceptes, fixeu-vos en les diferències entre un automatisme convencional, basat en el cablatge de tots els seus components, i un automatisme programat, basat en el programa que s’ha introduït a l’autòmat programable.
En l’automatisme convencional o cablat les condicions de funcionament de la instal·lació estan definides per les connexions mitjançant cables entre tots els elements de maniobra que componen la instal·lació, que connecten en sèrie o paral·lel els contactes de polsadors, tèrmics, relés, temporitzadors, etc., que acabaran connectant les bobines dels relés, temporitzadors, contactors, etc., que en activar-se faran que la instal·lació faci els moviments desitjats.
En l’automatisme programat tots els elements de control estan connectats mitjançant cables, directament a l’autòmat programable, i no estan interconnectats entre ells. És mitjançant les instruccions introduïdes al programa de l’autòmat que es defineixen com han d’estar connectats, en sèrie o paral·lel, i quan han d’obrir o tancar els contactes dels elements de comandament i, en definitiva, quan s’han de connectar les bobines dels contactors que activaran els actuadors de la instal·lació i faran que la instal·lació faci els moviments desitjats.
Instal·lació electromecànica
Exemples d'instal·lacions electromecàniques
D’instal·lacions electromecàniques n’hi ha moltes i de tot tipus, petites i molt senzilles com la porta automàtica d’un pàrquing, o grans i complexes com una cadena de producció de cotxes.
Entenem per instal·lació electromecànica qualsevol instal·lació que s’alimenta amb energia elèctrica i mitjançant components mecànics duu a terme una tasca determinada i produeix un producte final; es componen, com es veu en la figura, de tres parts:
- Pupitre de comandament. El lloc des del qual els operaris poden intervenir en el funcionament de la instal·lació enviant informació al quadre de control mitjançant els captadors, com polsadors, selectors, etc., i on es pot visualitzar com funciona la instal·lació mitjançant les ordres que reben els actuadors, com pilots, visualitzadors, etc., des del quadre de control.
- Maquinaria o instal·lació. El conjunt d’elements que configuren l’estructura i components que fan la tasca per a la qual ha estat dissenyada la instal·lació; rep les ordres del quadre de control per activar els actuadors, com motors, cilindres, etc., i envia informació de l’estat de la instal·lació mitjançant els captadors, com finals de cursa, detectors, etc.
- Quadre de control. El lloc de la instal·lació on hi ha definit el tipus de funcionament o seqüència de treball que ha de fer la instal·lació; en funció de la informació que li envien els captadors dóna ordres de connexió als actuadors. Conté tots els elements de maniobra com comptadors, relés, temporitzadors etc., que poden ser substituïts per un autòmat programable, i també els elements de potència i protecció, com transformadors, contactors, fusibles, tèrmics, etc.

Quan una instal·lació electromecànica tingui un autòmat programable en el quadre de control per definir la seqüència de treball, tots els captadors, és a dir, tots els elements que envien informació al quadre de control, es consideren entrades, i tots els actuadors, és a dir, tots els elements que reben ordres del quadre de control, sortides del PLC, independentment que estiguin situats al pupitre de comandament o a la instal·lació.
La informació que envien els captadors i les ordres que reben els actuadors es fan mitjançant senyals elèctrics.
Preactuadors
Per adaptar el senyal elèctric del PLC, que és de petita potència, en els actuadors que acostumen a consumir més potència s’utilitzen els preactuadors, com els contactors.
En la secció “Recursos de contingut” del web d’aquest mòdul podeu veure un vídeo amb exemples d’instal·lacions automatitzades.
Tipus de senyals elèctrics
El senyal elèctric, referit als circuits d’automatismes, és la quantitat d’energia elèctrica que circula pels components de comandament d’una instal·lació per enviar informació i rebre ordres del quadre de control.
Els senyals elèctrics poden ser de tensió o d’intensitat i de corrent continu o altern.
- Els senyals de tensió més freqüents són 10 V o 24 V en corrent continu i 220 V en corrent altern.
- Els senyals d’intensitat més freqüents són 0-20 mA (mil·liamperes) o 4-20 mA en corrent continu.
Exemple del tipus de senyal
El senyal que envia l’interruptor d’una habitació quan l’accionem és de 220 V de corrent altern, i el senyal que envia el polsador d’un ascensor és de 24 V de corrent continu.
En els circuits d’automatismes hi ha dos tipus de senyals elèctrics, els digitals i els analògics.
- Senyal digital. Normalment són senyals de tensió, tant de corrent continu com d’altern; només poden tenir dos estats, que es representen utilitzant el sistema de numeració binari, que està format per zeros i uns.
- Estat 0: relacionat amb: “no dóna senyal”, “no funciona”, “està desconnectat”, “circuit obert”.
- Estat 1: relacionat amb: “sí que dóna senyal”, “sí que funciona”, “està connectat”, “circuit tancat”.
- Senyal analògic. Acostumen ser tant de tensió com d’intensitat de corrent continu; són senyals elèctrics que, entre un valor mínim i un màxim, poden tenir qualsevol valor, i per representar-los s’utilitza el sistema de numeració decimal. És a dir, el captador enviarà 1,2 V o 6,4 V, etc., el PLC convertirà aquest senyal analògic en digital per poder processar-lo, visualitzant-lo convertit en una magnitud física que puguem entendre. En la taula tenim un exemple de captadors (entrades) i actuadors (sortides), que envien o reben informació mitjançant senyals elèctrics digitals i analògics.
| Senyal | Digital | Analògica |
|---|---|---|
| Entrada | Sensor ultrasònic de presència Quan detecta en qualsevol punt de la seva zona d’accés, dóna 1. | Cèl·lula fotoelèctrica En funció de la distancia on detecti dintre de la seva zona d’acció, dóna un valor entre 0 i 10 V. |
| Sortida | Contactor per a l’accionament d’un motor El motor funciona, girant a la velocitat nominal, o no funciona i està parat. | Variador de velocitat d’un motor En funció de la tensió de consigna entre 0 i 10 V el motor gira a més o menys velocitat. |
Circuit d'automatisme amb autòmat programable
L’autòmat programable simplifica i abarateix molt els circuits d’automatisme, i per això actualment estan molt introduïts, s’utilitzen molt i hi ha models de diferents configuracions per adaptar-se a les característiques de qualsevol instal·lació, des del més simple fins al més complex. En la figura es mostren les diferències fonamentals entre un circuit fet amb lògica cablejada, el sistema convencional, és a dir, sense PLC, i amb lògica programada amb un PLC.
Tractament del senyal analògic
Quan ens pesem en una bàscula electrònica, el senyal que es genera és una tensió entre 0 i 10 V, que la bàscula converteix en un valor binari per processar-lo i visualitzar-lo en la pantalla convertit en un valor proporcional expressat en kg.

Els dos esquemes de la figura representen un mateix circuit d’automatisme fet amb les dues tecnologies, cablada i programada. Si us fixeu bé en els esquemes podreu observar les diferències següents:
Aplicacions dels autòmats
Hi ha PLC per a aplicacions molt petites i molt econòmiques, pràcticament pel preu d’un parell de relés i un temporitzador, però també podeu trobar un PLC amb més de cent relés i deu temporitzadors interns, entre altres funcions.
- El cablatge, és a dir, la interconnexió entre els elements que configuren la instal·lació, és molt més complexa en la lògica cablada, ja que hi ha connexions en sèrie, en paral·lel i mixtes, mentre que en la lògica programada la connexió és molt senzilla i consisteix en un cable que uneix tots els captadors i un altre cable que uneix tots els actuadors, i després hi ha uns cables que uneixen cada captador i actuador amb el PLC.
- Amb la lògica cablada hi ha molts més contactes, en total quinze, i amb la programada només set. Això es deu al fet que:
- El captador FC1 (final de cursa) fa dues funcions i amb lògica cablada necessita dos contactes, però amb la programada amb un contacte n’hi ha prou.
- Amb lògica cablada són necessaris els contactes auxiliars de contactors, com K1M, de relés, com K1 i K2, i de temporitzadors, com K1T, i amb lògica programada no cal connectar-los, ja que podem programar els que té el PLC internament.
- Amb la lògica cablada hi ha més bobines corresponents a actuadors, en total sis, i amb la programada només tres. Això es deu al fet que les bobines dels temporitzadors i relés auxiliars no cal connectar-les, ja que podem programar els que té internament el PLC.
- El circuit amb lògica programada utilitza un autòmat programable, que necessita un programa, i amb la cablada no cal.
-

- Memòries de PLC
La diferència fonamental entre el circuit amb lògica cablada i lògica programada és que en el primer circuit, si el connectem a la xarxa elèctrica i accionem el captadors, la instal·lació funciona, i per contra, el circuit amb lògica programada no ho fa, i això és degut al fet que el circuit amb autòmat programable necessita que aquest tingui un programa emmagatzemat a la memòria del PLC.
Programa de l'autòmat programable
El programa de l’autòmat programable d’una instal·lació està format per una sèrie ordenada d’instruccions que corresponen a l’esquema elèctric que faríeu si realitzéssiu la instal·lació amb lògica cablejada; cada instrucció ha de contenir tota la informació necessària de cada element de l’esquema elèctric. En la figura teniu un exemple d’un circuit molt elemental en què es veu com es connecten els elements d’un esquema amb lògica cablada, i com es connecten a l’autòmat programable per fer el mateix circuit amb lògica programada, que ens servirà d’exemple per raonar com hem de fer el programa del PLC, que consistirà a indicar com estan interconnectats aquests elements.

En l’esquema de l’esquerra de la figura, que correspon al circuit amb lògica cablada, podeu comprovar el funcionament de la instal·lació, i veureu que perquè funcioni l’actuador K1M han d’estar activats el captador S3 i un dels captadors S1 o S2.
A la dreta de la figura teniu la interconnexió dels captadors i l’actuador amb el PLC, i podeu observar que S1 està connectat al born 3 del PLC, S2 al born 5 i S3 al born 6. Això implica que a partir d’aquest moment els captadors els considerem com a entrades del PLC i ja no seran S1, S2 i S3, sinó les entrades E3, E5 i E6, respectivament, i pel mateix motiu el captador K1M serà la sortida S4.
Com que l’esquema té quatre elements necessitarem quatre instruccions per fer el programa del PLC; cada instrucció del programa ha de contenir tota la informació de cada element i això ho aconseguim mitjançant tres dades:
- Operació. Ha d’indicar què fa aquest element dintre del circuit o, dit d’una manera més entenedora, com està connectat. En principi descriurem les operacions més elementals per entendre aquest exemple, que són:
- Inici: si està connectat al principi de l’esquema, en aquest exemple correspondria a S1.
- Final: si està connectat al final de l’esquema, en aquest exemple correspondria a K1M.
- Paral·lel: si està connectat en paral·lel, en aquest exemple correspondria a S2.
- Sèrie: si està connectat en sèrie, en aquest exemple correspondria a S3.
- Operand. Ha d’indicar quin tipus d’element és. De moment només descriurem els dos que necessitem per entendre aquest exemple, que són:
- Entrades: elements que envien senyals elèctrics al PLC.
- Sortides: elements que reben senyals elèctrics del PLC.
- Paràmetre: ha d’indicar quina entrada o sortida és.
El conjunt d’operacions, operands i paràmetres d’un PLC es coneix com a mapa de memòria del PLC.
Cada instrucció del programa del PLC correspon a un element de l’esquema. Normalment l’ordre de programació es porta a terme amb els elements situats d’esquerra a dreta i de dalt a baix.
Totes les instruccions dels autòmats programables estan formades per tres dades, que són: operació, operand i paràmetre.
En la taula s’indica com seria el programa corresponent a l’esquema de la figura.
| Informació de l’element | Adreça | Operació | Operand | Paràmetre |
|---|---|---|---|---|
| S1 | 1 | Inici | Entrada | 3 |
| S2 | 2 | Paral·lel | Entrada | 5 |
| S3 | 3 | Sèrie | Entrada | 6 |
| K1M | 4 | Final | Sortida | 4 |
Aquest programa està format per quatre instruccions; s’han descrit les diferents operacions, operands i paràmetres amb unes denominacions molt generals i fàcils d’entendre, però heu de tenir en compte que cada fabricant d’autòmats utilitza uns codis diferents i que no corresponen a aquesta denominació general. Així doncs, la primera cosa que heu de fer per fer un programa per a un PLC és conèixer els codis del fabricant d’aquest autòmat, que es coneixen com a àrees de memòria i funcions. En la taula s’indica com seria el programa de la taula adaptat als codis de l’autòmat S7-1200 de Siemens.
| Adreça | Programa general | Programa S7-1200 de Siemens |
|---|---|---|
| 1 | Inici entrada 3 | L I 0.3 |
| 2 | Paral·lel entrada 5 | O I 0.5 |
| 3 | Sèrie entrada 6 | A I 0.6 |
| 4 | Final sortida 4 | = Q 0.0 |
Codificació interna dels programes dels autòmats programables
Quan nosaltres introduïm el programa corresponent a un esquema en un autòmat programable, ho fem escrivint directament amb la programadora els codis corresponents a l’operació, operand i paràmetre d’aquest autòmat (L, O, I, Q, etc.), però, lògicament, dintre del PLC no es guarda aquesta informació tal com l’escrivim, sinó que cada codi corresponent a l’operació, operand i paràmetre es converteix en una seqüència de zeros i uns, és a dir, es guarda codificat en binari.
Per veure les característiques del maquinari i programari de les diferents CPU de l’autòmat S7-1200 de Siemens, aneu a la secció “Annexos” del web d’aquest mòdul.
Codi binari
És el codi utilitzat pels autòmats programables per realitzar totes les operacions internes. Cada dígit del sistema de numeració binari que pot tenir el valor zero o u, l’anomenem bit.
L’operació que fa l’autòmat programable de guardar el programa codificat en binari s’anomena compilació.
Cada instrucció del programa necessita 16 bits per guardar la informació corresponent a cada element, i cada grup de 16 bits s’anomena paraula, encara que s’utilitza molt el terme anglès word. El programa codificat en binari en words es guarda en la memòria del PLC. En la taula teniu un exemple de com es codifiquen en binari les instruccions de programació d’un autòmat programable.
| Instrucció | Codi operació bits 1 a 3 | Codi operand bits 4 a 6 | Codi paràmetre bits 7 a 16 |
|---|---|---|---|
| Inici | 000 | ||
| Sèrie | 010 | ||
| Paral·lel | 101 | ||
| Final | 111 | ||
| Entrada | 000 | ||
| Sortida | 111 | ||
| Paràmetre 0 | 0000000000 | ||
| Paràmetre 1 | 0000000001 | ||
| Paràmetre 2 | 0000000010 | ||
| Paràmetre 3 | 0000000011 | ||
| Paràmetre 4 | 0000000100 | ||
| Paràmetre 5 | 0000000101 | ||
| Paràmetre 6 | 0000000110 |
En la taula teniu com es guardaria el programa de la figura segons la codificació que hem posat com a exemple en la taula.
| Programa general | Programa codi S7-200 Siemens | Programa codificat en binari |
|---|---|---|
| Inici entrada 3 | L I 0.3 | 000 000 0000000011 |
| Paral·lel entrada 5 | O I 0.5 | 101 000 0000000101 |
| Sèrie entrada 6 | A I 0.6 | 010 000 0000000110 |
| Final sortida 4 | = Q 0.0 | 111 111 0000000100 |
Memòries
Els programes que fa l’usuari perquè la instal·lació faci una tasca concreta i els que introdueix el fabricant perquè l’autòmat faci les operacions internes necessàries es guarden en les memòries del PLC, que són un circuits integrats que emmagatzemen tota la informació codificada en binari.
El programa s’introdueix mitjançant una programadora, que actualment consisteix en un programari que s’instal·la en qualsevol ordinador personal; així doncs, mentre s’està confeccionant el programa s’utilitza la memòria de l’ordinador i quan es vol provar el funcionament es transfereix el programa a la memòria del PLC.
-

- Programadores de PLC
Les memòries es poden dividir en dos grups segons la funció que fan: les memòries d’usuari i les de sistema.
Els tipus de memòria d’usuari més utilitzats són la RAM, EPROM i EEPROM.
- Memòria d’usuari. És la memòria on es guarda el programa fet pel tècnic en automatismes i que fa que la instal·lació funcioni executant la seqüència de treball dissenyada.
- Memòries de sistema. Són les memòries que programa el fabricant per emmagatzemar els programes i la informació necessàries per al funcionament intern correcte del PLC, entre d’altres:
- Programa per convertir les instruccions introduïdes per l’usuari en un llenguatge que el PLC pugui processar, és a dir, per compilar el programa.
- Dades de procés i de control.
- Variables internes.
- Dades de configuració del PLC.
En funció de les tecnologies emprades i de seva funcionalitat, es pot donar la classificació següent de tipus de memòries:
- RAM (random access memory) o memòria d’accés aleatori. És una memòria volàtil, i per això si falla l’alimentació elèctrica es perden les dades emmagatzemades; es pot posar una pila o una bateria per mantenir les dades en cas que es talli l’alimentació elèctrica i es poden modificar les dades en qualsevol moment.
- ROM (read only memory) o memòria únicament de lectura. No perd la informació en cas de tall d’alimentació elèctrica; és una memòria amb un programa fix, muntada pel fabricant amb components electrònics, no està programada, l’usuari no hi té accés i no es pot modificar. Sol tenir les instruccions de funcions necessàries per al funcionament correcte de l’autòmat, com rutines d’inicialització, test, autodiagnòstic…
- PROM (programmable read only memory)o memòria únicament de lectura programable. És com una memòria ROM, però que el fabricant ha programat, a diferència de la ROM, que està muntada físicament amb components electrònics, i una vegada programada no es pot modificar.
- EPROM (erasable PROM) o memòria únicament de lectura programable. És possible esborrar-la totalment si se sotmet a l’exposició de rajos ultraviolats entre 10 i 20 min la finestreta que té a la part superior del circuit integrat.
- EEPROM (electrically erasable PROM) o memòria únicament de lectura programable i esborrable elèctricament. És com una memòria PROM, però es pot esborrar tot o part del programa mitjançant la programadora, sense necessitat d’exposar-la als rajos ultraviolats, i no perd la informació si falla el corrent.
El programa que fabrica l’usuari normalment es fa en una memòria RAM, per la facilitat de fer modificacions, i una vegada que el programa és definitiu, es pot deixar en aquesta memòria amb el suport d’una bateria, o copiar-lo a una memòria EPROM si no es vol que es modifiqui, o a una memòria EEPROM si es preveu que durant el funcionament normal de la instal·lació s’hagi de modificar alguna dada.
Els programes propis del sistema utilitzen tots els tipus de memòria: RAM i EEPROM per a les dades que es modifiquen durant el processament del programa, i les ROM, PROM i EPROM per a les dades fixes.
Arquitectura i funcionament intern dels autòmats programables
L’autòmat programable és un equip electrònic programable que en funció de l’estat de les entrades i de l’algoritme de control que té introduït mitjançant el programa, dóna ordres de connexió o desconnexió a les sortides; a escala interna es pot dir que tots els autòmats programables estan constituïts per tres grans blocs:
- CPU (central processing unit) o unitat central de processament. És l’encarregada d’organitzar el tràfic de dades, fer les operacions internes i controlar les entrades i sortides.
- Memòries. De diferents tipus de suport físic. Contenen el programa fet per l’usuari, les dades que es produeixen mentre s’executa el programa i els programes introduïts pel fabricant per al funcionament intern del PLC.
- Entrades i sortides. Mitjançant els corresponents mòduls d’interfície per adaptar els senyals, s’encarreguen de comunicar la CPU amb l’exterior, reben senyals de les entrades i n’envien a les sortides.
El funcionament intern dels PLC està basat en un sistema amb microprocessador.
Arquitectura dels autòmats programables
Els tres grans blocs de què consten els PLC (CPU, memòries i entrades/ sortides) es troben units mitjançant unes línies elèctriques per comunicar-se dades entre ells, anomenades busos de comunicació, que es divideixen en tres grups:
- Bus d’adreces. És per on el processador envia l’adreça de l’element al qual vol enviar informació o que vol que li enviï informació.
- Bus de dades És per on tots els elements envien les dades. És bidireccional, i la CPU pot posar dades perquè una adreça la llegeixi o pot llegir una dada que li enviï una adreça.
- Bus de control. És on el processador indica quina operació està fent; les més freqüents són llegir i escriure. Controla els blocs de memòria i d’entrades i sortides.
En la figura teniu un exemple de com es comuniquen els diferents blocs que configuren els PLC.

La CPU dels autòmats programables s’encarrega d’organitzar totes les tasques de control i comunicació entre els diferents blocs, per executar el programa fet perquè la instal·lació funcioni.
Els components que intervenen en el procés d’execució del programa (representats en l’esquema de la figura) són els següents:
- Valor d’entrada: es posa a 1 o 0 en funció de l’estat del captador.
- Registre d’entrada: emmagatzema el valor de l’entrada corresponent.
- Programa: instruccions corresponents a l’esquema elèctric que defineix el funcionament de la instal·lació.
- ALU (unitat aritmeticològica): és l’encarregada de fer les operacions aritmètiques, bàsicament sumes o productes, en funció del tipus de connexió dels contactes del circuit, paral·lel o sèrie.
- Memòries internes: emmagatzemen els resultats de les operacions aritmètiques fetes per l’ALU, les dades de configuració del PLC, i altres dades de control.
- Comptador d’adreces o rellotge: encarregat de dir en cada moment quina instrucció del programa s’ha d’executar. La CPU executa totes les instruccions del programa, d’una en una i en l’ordre que li marca el rellotge.
- Registre de sortides: emmagatzema el valor corresponent a la sortida en funció del resultat de l’execució del programa.
- Valor de sortida: es posa a 1 o 0 quan la CPU carrega el valor del registre de sortides a la sortida corresponent.

Funcionament intern dels autòmats programables
Els PLC poden tenir bàsicament dos estats: run i stop.
- Run. El PLC està actiu, la CPU llegeix el programa i dóna ordres de connexió o desconnexió als actuadors.
- Stop. El PLC està connectat al corrent però la CPU no llegeix el programa i, per tant, no es dóna cap ordre de connectar les sortides.
Quan el PLC està en run, la CPU, unitat central de processament de l’autòmat, executa el programa cíclicament, és a dir, llegeix contínuament el programa, instrucció rere instrucció.
Hi ha tres conceptes que heu de tenir clar quan treballeu amb autòmats programables, que són: scan, temps de scan i watchdog.
Scan
Cada cop que executa el programa una vegada, es diu que ha executat un cicle o un scan.
Watchdog significa ‘gos de vigilància’, i fa referència a la tasca que duu a terme de controlar el temps de cicle.
L’execució d’un scan consisteix en el següent:
- La CPU fa un autodiagnòstic intern i dels perifèrics.
- Mira el valor que tenen totes les entrades i guarda els valors en el registre d’entrades corresponent. Cada entrada té un bit que emmagatzema el seu valor en el registre d’entrades.
- El rellotge marca la primera adreça per llegir-ne la instrucció.
- La unitat aritmeticològica fa l’operació corresponent a la instrucció. En aquest procés, quan ha de llegir el valor d’una entrada ho fa del registre de l’entrada, no de l’entrada directament, i si ha d’assignar un valor a una sortida, ho fa sobre el registre de la sortida. Aquesta operació pot ser:
- L: inici, llegeix el valor de l’operand corresponent.
- A: sèrie, fa l’operació aritmètica del producte.
- O: paral·lel, fa l’operació aritmètica de la suma.
- =: final, assigna el valor a l’operand corresponent.
- Desa en la memòria interna el resultat de l’operació aritmètica si aquesta és L, O, A, o el desa en el registre de sortides si l’operació aritmètica és =.
- El rellotge marca l’adreça següent.
- Es repeteixen el passos 4 a 6 fins que executa la darrera instrucció.
- Mira els valors emmagatzemats en el registre de sortides i els assigna a les sortides corresponents.
- Es torna a repetir el procés des del pas 1 de manera cíclica.
Scan és l’execució del programa una vegada i consisteix en el següent:
- Fer un autodiagnòstic.
- Llegir l’estat de totes les entrades i carregar els valors al registre d’entrades.
- Executar tot el programa llegint les dades de les entrades del registre d’entrades i escrivint els resultats de les combinacions en el registre de sortides.
- Copiar els valors del registre de sortides a les sortides.
Temps de scan o de cicle
És el temps que triga la CPU a executar un cicle; aquest temps és molt important, ja que les ordres de connexió o desconnexió en els actuadors connectats a les sortides es fan al final del cicle, encara que la instrucció corresponent estigui al principi. Per tant, si el temps és massa llarg, podria succeir que es donés l’ordre d’aturar un motor perquè ha saltat una alarma i aquesta trigués massa a executar-se.
Temps de cicle
Mentre s’executa el cicle, les ordres de connexió i desconnexió es fan en el registre de sortides, no en la sortida, que es fa en finalitzar el cicle.
El temps de cicle depèn del següent:
- Tipus de CPU: tots els fabricants d’autòmats disposen de diferents CPU per a cada model de PLC, i així s’adapten a les necessitats dels usuaris. Una de les característiques més importants que diferencien les diferents CPU és la velocitat de processament.
- Nombre i tipus d’instruccions del programa: com més instruccions tingui el programa, més temps trigarà la CPU a llegir-lo, de la mateixa manera que hi ha instruccions que són més complexes que altres i lògicament es tarda més a executar-les.
- Nombre i tipus de perifèrics: al principi de cada cicle es fa un autodiagnòstic dels perifèrics; per tant, com més n’hi hagi i més complexos siguin més temps trigarà la CPU.
Watchdog
El watchdog controla la durada del temps de cicle, i quan aquest supera els valors establerts, dóna ordre d’aturar l’autòmat i passa de run a stop; per tant, la CPU deixa d’executar el programa i es desconnecten totes les sortides.
És més complex processar una entrada analògica que una de digital.
El temps de watchdog pot ser fix o programable, i depèn del tipus del CPU.
Les CPU petites, dirigides a instal·lacions senzilles i sense requeriments de seguretat, estan configurades de fabrica amb un temps de watchdog que el fabricant considera acceptable, i que pot arribar fins a 500 ms; en d’altres CPU, les més potents, el temps de cicle es pot definir en funció de la complexitat de la instal·lació i, com són molt més ràpides, es poden fixar temps entre 10 i 200 ms.
Interpretació del programa dels autòmats programables
Un programa d’un PLC és la traducció d’un esquema elèctric en un conjunt d’instruccions, però el PLC el que fa és interpretar el programa i no l’esquema elèctric. En la figura tenim un esquema elèctric que correspon a un circuit que hem muntat amb un PLC; s’hi pot veure en quines entrades i sortides estan connectats els captadors i els actuadors.
En la taula i la taula tenim el programa corresponent a l’esquema amb les operacions que fa la CPU en cada línia de programa en funció de l’estat de les entrades.
| Adreça | Programa | Valor d’entrades o sortides | Unitat aritmeticològica | Memòria interna |
|---|---|---|---|---|
| 001 | L I 0.3 | 0 | Carrega el valor 0 | 0 |
| 002 | O I 0.5 | 0 | 0 + 0 = 0 | 0 |
| 003 | A I 0.6 | 1 | 0 × 1 = 0 | 0 |
| 004 | = Q 0.0 | Assigna el valor 0 | 0 |
Interpretació de la taula:
- Com que només està accionat el captador S3, fixeu-vos que el valor corresponent a la seva entrada, la I0.6, està a 1 i la resta d’entrades estan a 0.
- En la instrucció 001 hi ha programada l’operació L; per tant, la CPU carrega el valor de l’entrada programada en aquesta instrucció, l’entrada I0.3, que val 0, en la memòria interna.
- En la instrucció 002 està programada la instrucció O, que correspon a una connexió en paral·lel, però la CPU del PLC, que no interpreta cap esquema elèctric, fa l’operació de sumar i suma el valor guardat a la memòria interna, que és 0, al valor de l’entrada programada en aquesta instrucció, I0.5, que també és 0, i el resultat de l’operació, que és 0, el torna a guardar en la memòria interna.
- En la instrucció 003 està programada la instrucció A, que correspon a una connexió en sèrie, però la CPU del PLC fa l’operació de multiplicar i multiplica el valor guardat en la memòria interna, que és 0, amb el valor de l’entrada programada en aquesta instrucció, I0.6, que és 1, i el resultat de l’operació, que és 0, el torna a guardar en la memòria interna.
- En la instrucció 004 està programada l’operació =, que correspon a l’ordre d’assignar el valor guardat en la memòria interna, que és 0, al registre de la sortida programada en aquesta instrucció, que és la Q0.0.
Ara podeu analitzar el funcionament del circuit quan estan accionats els captadors S2 i S3 (taula), que corresponen a les entrades I0.5 i I0.6, seguint el mateix raonament que hem fet amb la taula.
| Adreça | Programa | Valor d’entrades o sortides | Unitat aritmeticològica | Memòria interna |
|---|---|---|---|---|
| 001 | L I 0.3 | 0 | Carrega el valor 0 | 0 |
| 002 | O I 0.5 | 1 | 0 + 1 = 1 | 1 |
| 003 | A I 0.6 | 1 | 1 × 1 = 1 | 1 |
| 004 | = Q 0.0 | Assigna el valor 1 | 1 |
La CPU del PLC, sense interpretar cap esquema elèctric, però llegint el programa i fent les operacions aritmètiques en funció de les operacions programades, arriba a la mateixa conclusió que raonant l’esquema, i dóna ordre de desconnectar la sortida Q0.0 en l’exemple de la taula i de connectar-la en el de la taula.
Estructura i components dels autòmats programables
Hi ha molts tipus d’autòmats programables, i la classificació que se’n pot fer és molt diversa, en funció dels criteris que es vulguin aplicar, però la més usual és segons l’estructura física que té i segons com estan ubicats tots els components del PLC; atenent a aquest criteri els podem dividir en dos grans grups: compactes i modulars.
-

- PLC modular
-

- PLC compacte
- Estructura modular. Cada component del PLC es troba en un mòdul diferent, anomenats normalment targetes, que es munten damunt d’un bastidor, que pot ser un carril DIN o un perfil específic de cada fabricant, i que s’uneixen elèctricament mitjançant els busos de comunicació, que poden estar incorporats al bastidor mateix, o mitjançant uns cables amb connectors que uneixen tots les targetes.
- Estructura compacta. En un únic element, hi ha tots els components del PLC: CPU, bateries, memòries, mòdul d’entrada i de sortida, etc.
Molts dels PLC compactes de gama baixa i amb poques entrades i sortides tenen incorporada una petita consola de programació. Es coneixen com a microautòmats, i actualment la majoria d’aquests autòmats tenen la possibilitat d’ampliar les funcions mitjançant mòduls perifèrics, com ho fan els modulars.
Els temporitzadors ajustables són adequats quan el personal que ha d’ajustar els temps no és tècnic en PLC.
Independentment de l’estructura constructiva que tinguin els autòmats, tots estan configurats per una sèrie de components per fer les diferents funcions; els més comuns són:
- Unitat central de processament o CPU. La CPU és l’encarregada d’organitzar el trànsit de dades, executar el programa i controlar les entrades i sortides.
- Mòdul d’alimentació. És l’encarregat de subministrar totes les tensions auxiliars a la resta de components.
- Mòdul de bateries. Conté la pila que alimenta els relés amb memòria, el temporitzador horari o rellotge i la memòria RAM perquè no perdi la informació quan falla l’alimentació elèctrica.
- Mòdul de memòries. Conté el xip amb la memòria del programa.
- Mòdul de temporitzadors. La majoria de temporitzadors són programables, és a dir, el temps es pot variar mitjançant les instruccions de programació, però també n’hi ha d’ajustables, que tenen l’avantatge que el temps es pot modificar externament, ajustant un petit potenciòmetre, sense haver d’entrar en el programa.
- Mòduls d’entrada i sortida digitals. Són els mòduls on es connecten les entrades i sortides digitals que hi ha a la instal·lació, i tenen uns LED que ens indiquen en cada moment quins elements estan activats; en funció de les necessitats de l’usuari hi ha mòduls:
- Per a diferents tensions: 24 V CC, 24 V CA, 127 V CA, etc.
- Que suporten diferents intensitats: 20 mA, 2,5 A, etc.
- També n’hi ha amb el següent:
- Separació galvànica, amb la qual cosa es protegeix el circuit interior del mòdul.
- Sense separació galvànica.
- Mòduls d’entrada i sortida analògics. N’hi ha de molts tipus:
- Amb senyals d’intensitat o tensió.
- Amb diferents resolucions, com 8, 10 o 12 bits.
- Amb diferents codificacions: binari, BCD.
- Mòduls especials. Dissenyats per fer tasques complexes, s’utilitzen en PLC modulars i de gran potència; els més freqüents són: controladors PID, control d’eixos i comunicacions.
Perifèria dels autòmats programables
La característica més important dels autòmats programables és que són uns equips totalment oberts, ampliables i dissenyats per admetre la connexió de molts tipus diferents de components; els més comuns en tots els PLC són les entrades i sortides, tant digitals com analògiques.
Rangs de les entrades i sortides analògiques
La majoria d’entrades i sortides analògiques treballen amb els senyals elèctrics de 0-10 V CC (volts de corrent continu) i 4-20 mA (mil·liamperes).
La majoria d’autòmats tenen incorporades a la CPU (unitat central de processament) una sèrie d’entrades i sortides que es coneixen com a perifèria integrada.
Entrades digitals
Les entrades digitals subministren informació al PLC de l’estat de la instal·lació mitjançant les targetes d’entrada.
Per connectar o desconnectar les targetes al PLC, el PLC ha d’estar sense alimentar.
Tipus d'entrades
Les entrades poden ser amb contacte elèctric i sense contacte elèctric.
- Amb contacte elèctric: polsadors, interruptors, finals de cursa, contactes auxiliars de contactors, contactes auxiliars de relés de protecció, encoders, etc.
- Sense contacte elèctric: detectors inductius, capacitatius, fotoelèctrics, ultrasònics, etc.
Poden estar preparades per funcionar amb corrent continu o altern. N’hi ha que donen el senyal elèctric amb lògica positiva o negativa, i aquesta polaritat ha de coincidir amb la del tipus de targeta en què es connectin.
Tipus de detectors
-

- Tipus de detectors
Els detectors són entrades sense contacte elèctric, és a dir, no tenen un contacte físic que obre o tanca per transmetre el senyal, sinó que envien el senyal mitjançant un component electrònic. Hi ha detectors de dos o de tres fils.
- Detectors de dos fils: s’ha de tenir en compte el corrent residual, que és el corrent que necessita el detector en estat obert per funcionar i que pot arribar a activar l’entrada del PLC. N’hi ha de dos tipus: no polaritzats i polaritzats.
- No polaritzats: no importa la polaritat; n’hi ha per treballar amb corrent continu i amb corrent altern i alguns funcionen indistintament en totes dues tensions.
- Polaritzats: només poden treballar amb corrent continu i se n’ha de controlar la polaritat. No tenen corrents residuals, necessiten alimentació externa i poden ser amb lògica positiva (NPN) o amb lògica negativa (PNP). En la figura podeu veure la polaritat a la sortida dels detectors NPN i PNP.
- Detectors de tres fils: tots els detectors de tres fils són polaritzats.

Condicionament del senyal de les entrades
Les targetes d’entrada s’encarreguen d’adaptar i filtrar el senyal procedent de les entrades, normalment a 24 V, a les característiques del funcionament intern del PLC, que solen treballar a 5 V.
Si intercanviem els cables de connexió en un detector polaritzat, es pot avariar.
Connexió de detectors de tres fils
Si el detector és del tipus NPN, vol dir que dóna sortida + a la bobina i, per tant, el comú de la bobina s’ha de connectar al -. Si és del tipus PNP, és a l’inrevés.
Les targetes d’entrada poden ser de dos tipus, amb el senyal d’entrada aïllat galvànicament o sense aïllar.
L’aïllament galvànic del senyal pot ser:
- Inductiu: per a entrades amb senyals de corrent altern; es fa mitjançant un transformador.
- Òptic: per a entrades amb senyals de corrent continu; es fa mitjançant un optoacoblador.
En la figura podeu veure el procés d’adaptació del senyal.
Optoacoblador
El senyal que arriba a l’optoacoblador produeix un raig de llum en el díode electroluminiscent que capta el fototransistor i el converteix un altre cop en un senyal elèctric proporcional al raig de llum.

Fixeu-vos que el senyal del captador que arriba a la targeta d’entrades és tractat en tres fases per adaptar-la al bus intern del PLC:
- Si el senyal és de corrent altern:
- Es converteix a corrent continu.
- El senyal passa per un filtre per evitar que hi entrin paràsits.
- Es defineixen els valors mínims i màxims del senyal, en què es considera l’entrada activada o no, s’eliminen les petites fluctuacions i es converteix el senyal en un valor digital, que serà 1 o 0.
- Es disposen els elements de protecció per evitar sobretensions.
- S’aïlla galvànicament el senyal que arriba de l’exterior del senyal interior, és a dir, no hi ha contacte elèctric entre tots dos senyals; en aquest exemple es fa mitjançant un optoacoblador.
- S’adapta la tensió generada per l’optoacoblador als valors en què treballa internament la targeta d’entrades.
Els mòduls o targetes d’entrada s’encarreguen del següent:
- Amplificar el senyal que arriba del captador.
- Adaptar els nivells de tensió del captador als del PLC.
- Filtrar el senyal per evitar comportaments no volguts.
- Codificar el senyal perquè pugui ser processat pel PLC.
Sortides digitals
Les sortides digitals reben ordres del PLC i en posar-se en funcionament fan que la instal·lació faci les tasques per a la qual ha estat concebuda.
Els actuadors o elements de sortida més freqüents són:
- Pilots i pantalles per subministrar informació.
- Motors i cilindres pneumàtics i hidràulics per realitzar moviments.
Els motors no es poden connectar directament a les targetes de sortida, ja que acostumen a ser trifàsics i de molta potència, i els cilindres realitzen els moviments mitjançant les electrovàlvules, que també tenen una potència superior a la que subministren les targetes; així doncs, aquests elements es posen en funcionament des del PLC a través dels preactuadors, que adapten el senyal elèctric que subministra la targeta al senyal que necessiten els actuadors per funcionar correctament.
Tipus de targetes de sortida
Preactuadors
Els preactuadors més freqüents són els contactors; tenen la bobina amb un consum molt baix i es pot connectar directament a la targeta de sortida, i mitjançant els seus contactes de potència es pot activar qualsevol actuador.
- Amb sortida de tensió alterna o contínua.
- Amb lògica positiva o negativa.
- Lliures de potencial o a una tensió determinada.
- Aïllades galvànicament o sense aïllar.
- Tipus d’aïllament:
- Aïllament inductiu o magnètic mitjançant relé.
- Aïllament òptic mitjançant optotriac o optoacoblador.
Targetes de sortida a corrent continu
El senyal de sortida pot ser per transistor o per relé.
- Per transistor (estat sòlid):
- Entra en conducció quan la sortida s’activa.
- És adequat per accionar elements de petita potència.
- Pot ser amb negatiu comú o positiu comú.
- Per relé (lliure de potencial):
- Són sortides lliures de potencial, la sortida es connecta a un contacte del relé que no està alimentat elèctricament.
- Cada sortida pot accionar una sortida a tensió diferent.
- Té l’inconvenient de la velocitat de resposta.
Targetes de sortida de corrent altern
El senyal de sortida pot ser per triac o per relé.
-

- Targetes PLC
- Per triac (estat sòlid):
- Entra en conducció quan la sortida s’activa.
- Quan la sortida es desactiva, el triac continua conduint fins al primer pas per zero del corrent, i per aquest motiu no serveix en corrent continu.
- Per relé (lliure de potencial):
- Contacte lliure de potencial.
- Cada sortida pot accionar un accionador a tensió diferent.
- Té l’inconvenient de la velocitat de resposta.
Els mòduls o targetes de sortida s’encarreguen de:
- Descodificar la informació procedent del registre de sortides (rebre els valors 0 i 1).
- Amplificar i codificar el senyal de sortida que s’envia a l’actuador.
- Adaptar el nivells de tensió del senyal al tipus d’actuadors.
Les targetes de sortida que envien el senyal a l’exterior mitjançant un relé s’anomenen lliures de potencial i les que ho fan mitjançant un component electrònic com díodes o triacs, s’anomenen d’estat sòlid.
En la figura podeu veure com es connecten els actuadors a la targeta de sortides en funció del tipus de senyal que envia el mòdul de sortida.

Senyals analògics
Els senyals analògics s’utilitzen per convertir magnituds físiques, com temperatures, cabals, pressions, etc., en senyals elèctrics, mitjançant una relació entre els valors mínims i màxims de totes dues magnituds.
Les variacions produïdes en la magnitud física produeixen una variació del senyal elèctric directament proporcional a aquest senyal elèctric analògic, que obté infinits valors entre els seus valors mínim i el màxim, i necessita convertir-se en un senyal digital per poder ser tractat per l’autòmat. Aquest senyal digital també serà proporcional al senyal elèctric analògic, però no obtindrà valors infinits, sinó que entre el valor mínim i màxim canviarà d’unitat en unitat i en funció del nombre de bits del seu convertidor tindrà més o menys resolució.
La temperatura d’una sala amb un calefactor augmenta de manera progressiva, sense fer salts.
Característiques dels senyals analògics
Els senyals analògics poden ser de:
- Tensió:
- Els valor més freqüents són 0 a 10 V i -10 a +10 V.
- Poden tenir caigudes de tensió en funció de la distància.
En un senyal analògic de 0 a 20 mA, no hi diferència entre el valor mínim de la magnitud física, que donaria 0 mA, i la trencadora de fil, que també donaria 0 mA.
- Intensitat:
- Els valors més freqüents són 0 a 20 mA i 4 a 20 mA; aquest últim és el més emprat perquè detecta si el fil es trenca.
- Els senyals d’intensitat no els afecta la distància.
Els senyals d’entrada requereixen un convertidor A/D (analògic/digital) per convertir el senyal analògic en digital, i els de sortida un convertidor D/A (digital/analògic); aquests convertidors poden ser de 8, 10 o 12 bits.
La resolució del convertidor varia en funció del nombre de bits; com més bits millor resolució, i per tant més precisió.
La resolució d’un convertidor A/DoD/A és la capacitat que té per discernir entre dos valors molts similars de la magnitud d’entrada.
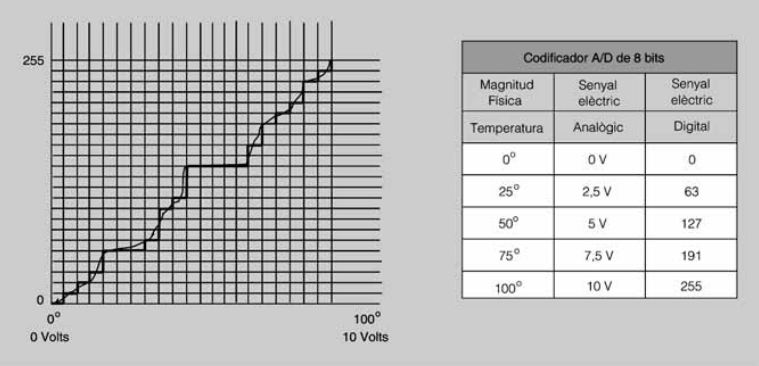
En la figura podeu observar la relació entre el valor analògic i el digital d’un senyal, i com el senyal analògic varia de manera progressiva sense esglaons i el digital fa salts d’un en un, entre 0 i 255 unitats, en un exemple amb un codificador A/D de 8 bits.
Càlcul de la resolució d’un convertidor
Amb un convertidor de 8 bits es poden fer 256 combinacions binàries diferents, des de 0000 0000, fins a 1111 1111, corresponents als valors en decimal de 0 a 255, i si el senyal analògic que li entra és 0-10 V, vol dir que la sortida digital incrementarà positivament o negativament una unitat el seu valor cada: 10/256 = 0,03906 39 mV.
En la taula podeu comprovar la diferència de resolució entre els convertidors de 8, 10 i 12 bits.
| Nre. de bits | Valor de tensió | Valor decimal | Càlcul de la resolució | Valor de la resolució |
|---|---|---|---|---|
| 8 | 0-10 V | 0-255 | 10 / 256 = 0,0390 | 39 mV |
| 10 | 0-10 V | 0-1.023 | 10 / 1.024 = 0,0097 | 9,8 mV |
| 12 | 0-10 V | 0-4.095 | 10 / 4.096 = 0,0024 | 2,4 mV |
Entrades analògiques
Les entrades analògiques s’utilitzen per fer mesures de totes les magnituds físiques que es produeixen en un procés de fabricació, com nivells, pressions, cabals, nivell de CO2, etc.
Observeu com passant d’un convertidor de 8 bits a un de 10 augmentem la resolució 4 vegades, i amb un de 12 bits, 16 vegades.
El captador per a senyals analògics consta bàsicament de dues parts:
- Transductor, que s’encarrega de convertir la magnitud física a mesurar en una magnitud elèctrica.
- Convertidor A/D, analògic/digital, que converteix el senyal elèctric analògic en un senyal digital (figura), quan aquest senyal s’ha d’enviar a un PLC, un autòmat programable, s’utilitzen captadors sense convertidor A/D, ja que les entrades analògiques dels PLC tenen incorporats els convertidors.

Per a la connexió de les entrades analògiques, convé utilitzar fil trenat i apantallat per evitar pertorbacions i obtenir valors incorrectes, i s’ha de connectar la pantalla al terra al costat del PLC, i el negatiu al costat del captador.
Procés de transformació del senyal analògic
El valor de la temperatura es troba entre -20 i +260o, es converteix en un valor de tensió entre 0 i 10 V i mitjançant el convertidor A/D es torna a convertir en un valor binari entre 0 i 255.
Les entrades analògiques requereixen un convertidor A/D (analògic/ digital) per adaptar el senyal del captador al PLC. Aquest convertidor el pot tenir el captador mateix, o si es treballa amb PLC el té incorporat el mòdul d’entrades analògiques mateix del PLC.
Sortides analògiques
Les sortides analògiques permeten accionar vàlvules proporcionals, variadors de velocitat i tot tipus d’actuadors en què convingui que el funcionament no sigui tot o res, sinó que es pugui ajustar.
Les sortides analògiques requereixen un convertidor D/A (digital/ analògic) per adaptar el senyal del PLC. Aquest convertidor el pot tenir l’actuador mateix, o si es treballa amb PLC el té incorporat el mòdul de sortides analògiques mateix del PLC.
Sortida analògica
Una vàlvula proporcional permet obrir més o menys la comporta d’un dipòsit en funció de la quantitat de producte que volem que caigui.
En la figura podeu comprovar el procés de transformació del valor binari que processa el PLC en un valor analògic de tensió entre 0 i 10 V, que produeix en el variador de velocitat uns canvis de freqüència que fa que el motor giri entre el 0% i el 140% de la seva velocitat nominal.

-

- Variador de velocitat
Per a la connexió de les sortides analògiques, convé utilitzar fil trenat i apantallat, i s’ha de connectar la pantalla al terra al costat del PLC, i el negatiu al costat de l’actuador, atès que el negatiu de les diferents sortides del mateix PLC sol ser comú.
Funcionalitat dels autòmats programables
Tots els autòmats tenen una sèrie de característiques comunes i que és important conèixer, com l’estat de funcionament, que pot ser:
- Stop: està connectat a l’alimentació però la CPU (unitat central de processament) no executa el programa i, per tant, la instal·lació no funciona.
- Run: la CPU executa el programa i la instal·lació funciona.
Programadora d'autòmats programables
Fa uns quants anys cada PLC tenia la seva consola de programació, i actualment tots els fabricants de PLC utilitzen ordinadors portàtils amb els programaris corresponents, com programadores.
La programadora pot treballar en dues situacions respecte al PLC:
- Off line: la programadora treballa sense estar connectada al PLC.
- On line: la programadora està connectada al PLC i pot intercanviar informació.
Quan el PLC treballa en línias’ha de tenir molta cura amb les operacions que es fan, ja que pot variar el funcionament de la instal·lació, i per això només ho ha de fer personal especialitzat.
Quan s’elabora un programa es poden fer moltes funcions que ajuden a l’edició d’aquest; les més comunes són:
- Esborrar un element o conjunt d’elements.
- Inserir un element o conjunt d’elements.
- Modificar el tipus, adreça o dades associades a l’element.
- Esborrar, copiar o afegir blocs o subrutines.
- Cercar o substituir elements.
- Crear taules d’ocupació d’elements i referències creuades.
Mentre la instal·lació està funcionant és molt interessant poder monitorar i intervenir en l’execució del programa; tots els PLC tenen funcions com:
- Visualització de l’estat dels elements.
- Visualització de l’estat del programa.
- Forçar entrades, sortides, registres, temporitzadors, etc.
Llenguatges de programació
Els autòmats han adaptat els llenguatges de programació als usuaris d’aquests equips i són molt intuïtius; els més usuals són:
- Esquema de contactes: es programa amb un esquema elèctric.
- Diagrama de funcions: es programa mitjançant un circuit de portes lògiques.
- Llista d’instruccions: utilitza unes instruccions relacionades amb l’àlgebra de Boole.
- GRAFCET, graphe de comande étape-transition: es descriu el funcionament de la instal·lació sense necessitat de raonar el circuit elèctric o electrònic.
- Llenguatges estructurats: per fer programes molt complexos es poden confeccionar en C, BASIC, Pascal, Fortran, etc.
El programari del PLC converteix automàticament els programes fets en un llenguatge de programació concret, en els altres llenguatges disponibles en el programari.
Per veure un exemple de com es pot realitzar un programa en els diferents llenguatges de programació que podeu utilitzar amb els autòmats programables, aneu a la secció “Annexos” del web d’aquest mòdul.
Característiques generals dels autòmats programables
Es pot definir un PLC com un equip que té les característiques següents:
- És una caixa “negra” configurada per mòduls estàndards, de configuració fàcil per a l’usuari o programador.
- És de dimensions reduïdes i amb gran capacitat de compactació.
- És fàcil de muntar i instal·lar.
- És fàcil de programar amb programaris molt intuïtius.
- Disposa de programaris que generen molta documentació del projecte.
- Disposa de programaris que subministren molta informació en línia.
- Disposa de la possibilitat d’emmagatzemar molts programes.
- És de reutilització fàcil per part d’altres aplicacions.
Un autòmat programable és un equip electrònic amb un microprocessador, que rep uns senyals de les entrades i que, en funció de l’algoritme de control que s’hagi programat, dóna unes ordres de connexió a les sortides.
La utilització dels PLC en el camp de l’automatització ha representat una sèrie d’avantatges molt importants, com ara els següents:
- Menys temps dedicat a la realització del projecte, ja que:
- No és necessari dibuixar esquemes de manera detallada, perquè els genera el programari del PLC mateix.
- Disposa de molta memòria i no és necessari simplificar les equacions.
- S’utilitzen menys materials i components, ja que el PLC té incorporades moltes funcions.
- Possibilitat d’introduir modificacions sense canviar el cablatge i sense haver d’afegir components.
- Menys cost de mà d’obra en la instal·lació.
- Economia en el manteniment, ja que en el PLC mateix es poden programar funcions per a la detecció d’errors i tasques de manteniment.
- S’utilitzen pocs elements amb accionament electromecànics.
- Possibilitat de governar diverses màquines amb un sol PLC. En cas de necessitar-ne diversos es poden comunicar fàcilment.
- Com són modulars és fàcil d’adaptar la seva constitució i funcionalitat.
- Hi ha la possibilitat d’introduir modificacions en línia, sense haver d’aturar la producció.
- Simplificació de les posades en marxa.
Amb tota la gamma d’autòmats que hi ha al mercat, és molt important tenir en compte una sèrie de dades a l’hora de seleccionar el més adequat per a cada projecte; entre altres, poden ser:
- Dades de catàleg: marca, model, fabricant, data de comercialització.
- Mapa de memòria: nombre màxim d’entrades, sortides, temporitzadors, etc.
- Dades de la CPU (unitat central de processament): temps de scan per a 1 kB de memòria, operacions que fa, etc.
- Ampliacions: tipus i quantitat de mòduls que es poden acoblar.
- Comunicacions: tipus de xarxes de comunicació que es poden configurar.
- Programació: llenguatges de programació disponibles, possibilitat de programació en línia, etc.
- Criteris econòmics: preu de l’equip, formació, assessorament, manteniment, servei tècnic, etc.
Evolució dels autòmats programables
Els autòmats programables van aparèixer l’any 1968 per encàrrec de l’empresa automobilística General Motors, ja que en les seves cadenes de producció es trobaven que hi havia:
- Excessives avaries en components electromecànics com els relés, dels quals n’hi havia milers en els quadres de control.
- Gran varietat de targetes electròniques: cada targeta estava dissenyada per a una funció concreta.
- Dificultat per fer modificacions en els processos de producció quan es volia introduir alguna millora.
El PLC apareix l’any 1968 com el substitut del següent:
- Armaris de relés. Internament disposen de multitud de relés, temporitzadors i altres components de comandament.
- Targetes electròniques. El PLC està basat en un microprocessador i es poden programar totes les funcions electròniques que calguin.
- Rigidesa en els processos automatitzats. Els PLC són programables, i per això és fàcil fer modificacions en els processos de producció.
Actualment disposen de funcions de càlcul complexes, com operacions matemàtiques, llaços de control, control numèric, etc., disposen de mòduls de comunicació per a diferents xarxes, com PROFIBUS, ethernet, etc. Poden comunicar-se amb sistemes SCADA (sistemes d’adquisició i visualització de dades en processos de control) per visualitzar i controlar el procés des d’un ordinador, poden treballar en sistema redundant en el qual dos PLC controlen un procés i comparen en cada scan els registres d’entrades i sortides i, si detecten discrepàncies, porten el procés a una posició estable i segura i s’aturen els dos, o poden tenir un sistema que determini quin dels dos equips falla.
En un futur no molt llunyà serà el substitut dels ordinadors de processos i dels equips de control distribuït en aplicacions mitjanes.
En la figura podeu observar l’evolució dels PLC des de la seva aparició: fixeu-vos que en un principi resultava car per a petites aplicacions i no servia per a aplicacions molt complexes, però actualment la relació cost-complexitat és molt competitiva, i comprèn quasi tot el terreny de la lògica cablejada i moltes aplicacions dels controls distribuïts, i la tendència en un futur molt pròxim és agafar tot el camp de la lògica cablejada i la majoria d’aplicacions dels controls distribuïts.
