


Operació dels motors de corrent continu
Ara que ja sabem què són els motors de corrent continu, com funcionen, i quins paràmetres hem de considerar, només ens falta l’últim pas: connectar-los. Però, per fer-ho, encara haurem de tenir en compte diversos aspectes.
Hi ha dos tipus bàsics de màquines en funció de la seva connexió del bobinat excitador:
- Màquines d’excitació independent: el corrent d’excitació es proporciona a través d’una font externa diferent al circuit de l’induït.
- Màquines autoexcitades: el corrent d’excitació el proporciona l’induït, amb la qual cosa no cal una font d’excitació independent. En aquest cas, tenim tres possibles connexions que ens indiquen com estan connectats els bobinats excitadors i induït:
- Connexió en sèrie
- Connexió en derivació o shunt (paral·lel)
- Connexió compound (composta)
Les diferents maneres de connectar el bobinat d’excitació s’aconsegueixen mitjançant els diferents borns de connexió dels motors. Així, és important que coneguem la designació dels borns d’un motor de cc. En motors petits com els dels electrodomèstics no ens trobarem aquesta designació. Però, si ens trobem amb motors de potències grans, sí que els veurem. A més, en funció que el motor hagi estat dissenyant per a una connexió o una altra, la designació dels borns de l’induït poden tenir diferent nom.
La designació dels borns dels motors de cc segueix la taula:
| Borns | Bobinat connectat |
|---|---|
| A-B | Bobinat de l’induït |
| C-D | Bobinat d’excitació en derivació |
| E-F | Bobinat d’excitació sèrie |
| J-K | Bobinat d’excitació independent |
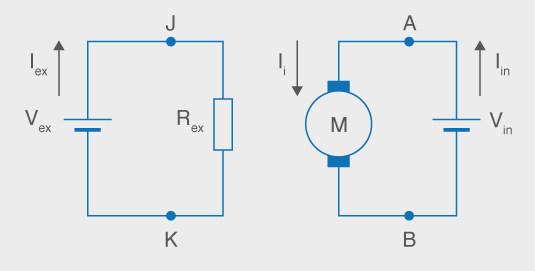
Motors d’excitació independent
Els motors d’excitació independent requereixen d’una font de tensió externa per generar el camp magnètic. L’esquema és com el de la figura.
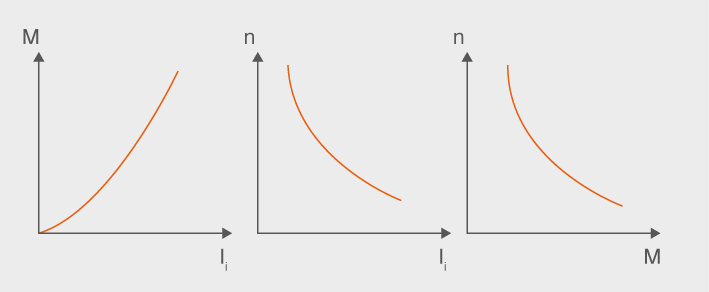
Les corbes característiques en aquesta configuració tenen la forma que es mostra a la figura.
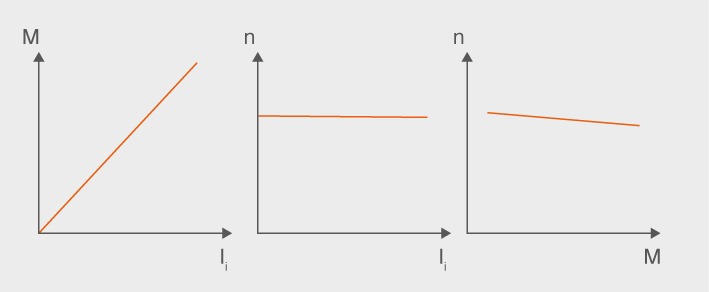
Com podeu observar, el consum de corrent augmenta linealment amb l’augment de la càrrega del motor (M). Per contra, la velocitat és molt estable, tant si augmenta el corrent com si augmenta el parell, el que acostuma a ser una molt bona característica d’aquest tipus de configuracions.
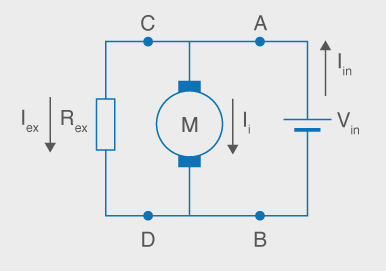
Motors d’excitació derivació (shunt)
Als motors amb excitació en derivació s’hi connecta el bobinat excitador amb el bobinat induït, com es pot veure a la figura.
Si analitzem elèctricament aquesta configuració, veiem que:



Les corbes característiques en aquesta configuració tenen la forma que es mostra a la figura, que són ben bé com les dels motors d’excitació independent (almenys en termes qualitatius, com és el cas ara).
Com podeu observar, el consum de corrent augmenta linealment amb l’augment de la càrrega del motor (M). Per contra, la velocitat és molt estable, tant si augmenta el corrent com si augmenta el parell. Això acostuma ser una molt bona característica d’aquest tipus de configuracions.
Motors d’excitació sèrie
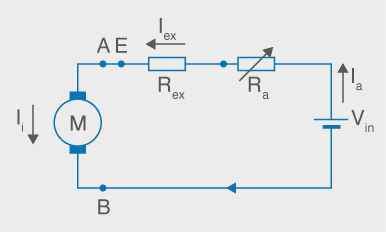
Als motors amb excitació en sèrie, la bobina de l’inductor i de l’induït es connecten en sèrie, com es veu a la figura.
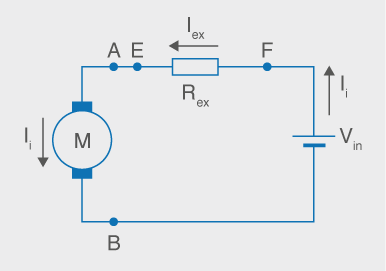
Com es pot observar del circuit, el corrent total que s’absorbeix de la font és la mateixa que circula per l’excitador i per l’induït. Per tant:

I la relació entra la tensió d’entrada i la força contraelectromotriu és:

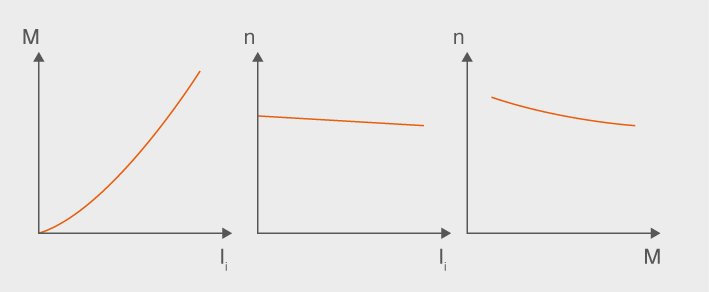
Les corbes característiques d’aquesta connexió tindran la forma que podeu veure a la figura.
Exemple de càlculs amb un motor sèrie
Disposeu d’un motor amb excitació en sèrie que es connecta a una font d’alimentació de contínua de 250 V. Si sabem que la resistència de l’induït és d’1 Ω i la de l’inductor de 0,5 Ω, que absorbeix un corrent de 5 A, i que hi ha una caiguda de tensió d’1 V a cadascuna de les escombretes, calculeu:
- La força contraelectromotriu que es genera.
- La potència que absorbeix.
Solució:
- Sabem que a un motor amb excitació en sèrie, el corrent que absorbeix és el mateix que el que circula per l’inductor i el l’induït. Per tant:

Ara podem fer ús de l’altra equació per calcular la fem:

D’aquí,

- La potència que absorbeix és de tipus elèctric, per tant, utilitzarem la fórmula genèrica d’elements de corrent continu:

Motors d’excitació compound
Els motors d’excitació compound o composta incorporen característiques de les dues connexions anteriors (sèrie i shunt o paral·lel). Així, generalment s’utilitzen quan es necessita un parell motor gran però al mateix temps es necessita una velocitat constant per a diferents càrregues. Per tant, són ideals per aplicacions de màquines grans on es produeixen canvis de càrrega freqüentment.
En aquesta configuració, la bobina inductora es divideix en dues parts. Una d’elles es connecta en sèrie i l’altra en paral·lel amb el bobinat induït. Existeixen dues maneres de fer aquesta connexió:
- Derivació curta
- Derivació llarga
D’aquesta manera obtindrem unes corbes característiques intermèdies entre la connexió en sèrie i connexió en paral·lel (figura).
Compound derivació curta
A la derivació curta, el bobinat d’excitació paral·lel, Rexd, es connecta en paral·lel amb l’induït, mentre que el bobinat d’excitació sèrie, Rexs, es connecta la sèrie amb tot el bloc anterior (figura).
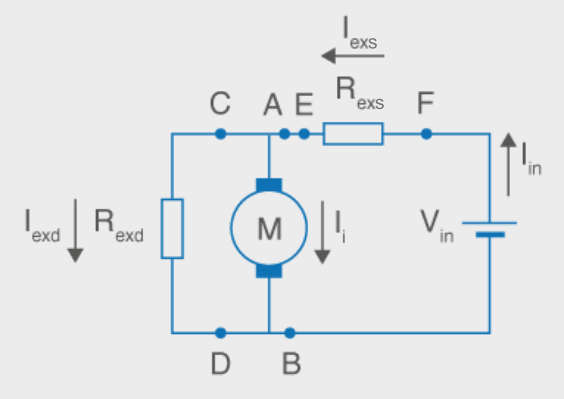
En aquesta configuració l’anàlisi elèctrica ens proporciona les següents equacions:




Compound derivació llarga
En aquesta configuració, el bobinat d’excitació sèrie, Rexs, es connecta en sèrie amb l’induït. A continuació, el bobinat d’excitació en paral·lel, Rexd, es connecta en paral·lel amb tot el bloc anterior (figura).
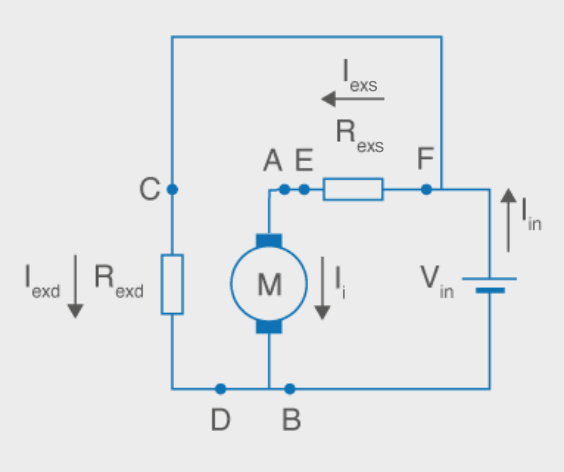
En aquesta connexió tenim que:



Inversió de gir en motors de contínua
Si recordeu quan vam parlar del principi de funcionament del motor, aquest es basava en el fet que es produïen un parell de forces sobre els conductors de l’espira, el sentit de les quals venia donada per la regla de la mà dreta.
En concret, si el corrent elèctric i el flux de camp magnètic eren perpendiculars, la força anava en la tercera direcció. Doncs treballant sobre aquest principi, si canviem les direccions d’una de les dues magnituds, corrent o camp magnètic, és evident que les forces canviaran de sentit.
Per tant, per canviar la direcció de gir del motor, hem de dur a terme una de les següents accions:
- Canviar el sentit de circulació del corrent d’induït Ii.
- Canviar el sentit del camp magnètic generat, cosa que s’aconseguiria canviant el sentit de circulació del corrent d’excitació Iex.
El contactor
El contactor és un element electromecànic que ha estat i és àmpliament utilitzat en automatització. En allò que respecta als motors, s’utilitza tant en els circuits de potència com de control amb la finalitat de controlar el comportament del motor.
Avui en dia, amb l’aparició d’elements de control electrònics, ha sigut substituït als circuits de control per variadors de freqüència. No obstant això, encara podem trobar-los en els circuits de potència així com en circuits de control de motors més econòmics.
Encara que el veureu amb detall al mòdul formatiu d’automatismes industrials, farem aquí una petita introducció per poder entendre el funcionament dels circuits de connexió dels motors d’inducció.
Podem dir que el contactor està format per tres parts ben diferenciades:
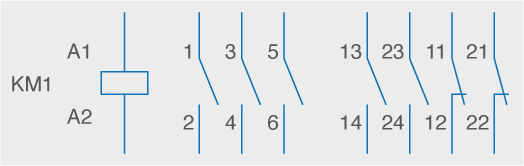
- Electroimant: és l’element de control dels contactes. Quan fem circular un corrent per la seva bobina, crea un camp magnètic que el fa actuar com un imant, de manera que fa commutar tots els altres contactes. Els seus borns són A1 i A2.
- Contactes principals: són els contactes de potència, per tant, el motor es connectarà directament a ells. En corrent continu (o en altern monofàsic) existeixen dos contactes que s’obren i tanquen a la vegada, un per al viu i l’altre per a la massa. Els seus borns són 1 i 2 i 3 i 4, de manera que quan s’acciona l’electroimant, es posen en contacte els borns 1-2 i 3-4.
- Contactes auxiliars: són contactes que s’utilitzen per als circuits de control. Igual que els contactes principals, no són més que interruptors que commuten quan s’actua sobre l’electroimant i que tornen a la seva posició de repòs quan es deixa d’actuar. En aquest cas, els borns porten dos números: un que ens diu el número de contacte, i l’altre que ens diu si és normalment obert o normalment tancat. 1-2 ens diu que el contacte és normalment tancat, mentre que 3-4 ens diu que normalment obert. Per exemple, un parell de contactes auxiliars 11-12 ens diu que el primer contacte auxiliar és NT, mentre que 23-24 ens diu que el segon contacte auxiliar és NO.
Normalment obert (NO) vol dir que en condicions de repòs l’interruptor està obert i no hi ha contacte entre els terminals. Al contrari, normalment tancat (NT, NC en castellà i anglès) vol dir que els contactes de l’interruptor estan tancats en condicions de repòs.
Els contactors es denominen KMx, on x és el número de contactor en el circuit. A la figura podeu veure el símbol utilitzat per als contactors.
Esquema d'inversió de gir
A l’esquema de la figura podeu veure l’esquema de la inversió de gir d’un motor de corrent continu realitzat amb contactors.
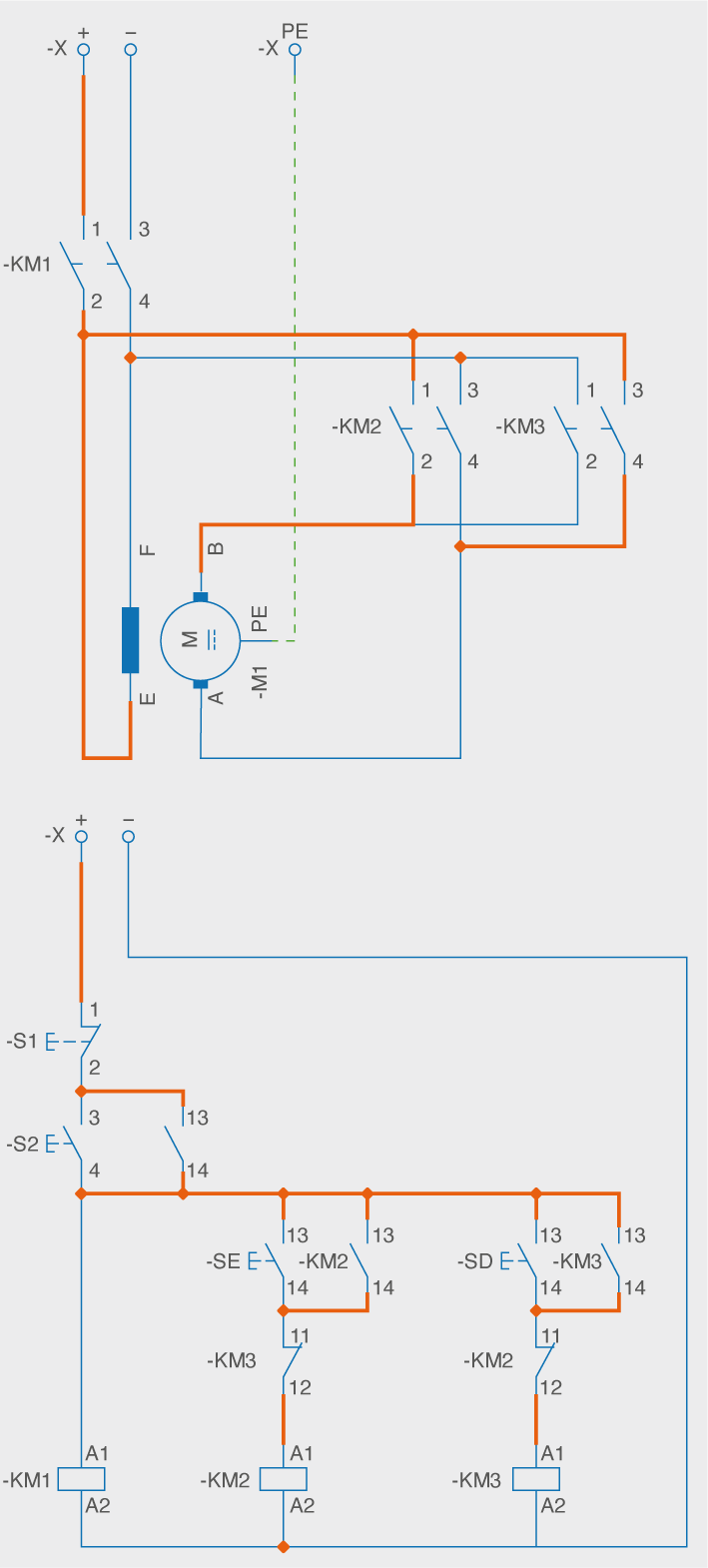
En els esquemes d’automatismes normalment trobareu dos subcircuits: el de potència, que s’encarrega d’alimentar directament la màquina, i el de control, que s’encarrega de processar els senyals de l’operari i controlar el comportament del circuit de potència.
En el circuit de la figura podeu observar que tenim a l’esquerra el circuit de potència, que s’encarregarà d’alimentar el motor, i el circuit de control, que controlarà el de potència.
El control d’aquest tipus de circuits es realitza per mitjà dels contactors.
En el nostre circuit disposem de tres contactors, KM1, KM2 i KM3. El comportament dels contactes d’aquests contactors es fa a través de les seves bobines, que estan marcades amb els contactes A1 i A2.
A més, en aquest circuit tenim 4 polsadors:
- -S1: polsador d’aturada
- -S2: polsador d’arrencada
- -SE: polsador de gir a l’esquerra
- -SD: polsador de gir a la dreta
A continuació seguirem una seqüència en aquest circuit i veurem com treballa.
- El primer que farem serà polsar -S2, amb el que s’alimentarà la bobina de KM1 i tots els seus contactes commutaran. Amb els contactes 1 i 2 de KM1 queda alimentada la bobina excitadora, mentre que amb els contactes 13 i 14 queda realimentat el contactor, és a dir, podem deixar anar -S2 i el contactor KM1 quedarà activat.
- Ara polsem -SE. Això fa que s’alimenti la bobina de KM2, amb el que tots els seus contactes commuten. Els contactes 1-2 i 3-4 de KM2 passen a estar tancats, amb el que ja tindrem corrent a l’induït del motor, i començarà a girar en un sentit. El contactor KM2 també queda realimentat pels seus contactes 13-14, de maner que podem deixar anar -SE i el motor encara seguirà en funcionament.
- Si ara polsem -SD no passarà res, ja que els contactes 11-12 de KM2 estan oberts i la bobina de KM3 no es pot alimentar. Per tant, per fer girar el motor hem de deixar d’alimentar KM2. O el que és el mateix, hem d’aturar el motor. D’això se’n diu inversió de gir passant per aturada.
- Per aturar el motor, accionem -S1. Deixarem d’alimentar tots els contactors i els seus contactes tornaran a la seva posició de repòs.
- Si ara volem fer que giri cap a la dreta, hem de seguir la seqüència polsar -S2 i desprès -SD.
Fixeu-vos que aquest circuit incorpora un mecanisme de seguretat amb els contactes 11-12 de KM2 i KM3, de manera que mai poden KM2 i KM3 estar activats a la vegada. Això és molt adient ja que així no es podrà alimentar el circuit a través dels contactes principals del dos contactors provocant una curtcircuit, però fa que haguem d’aturar el motor per invertir el sentit de gir.
Arrencada de motors de contínua
Ja vam comentar que l’arrencada del motor és un moment crític, ja que el corrent que consumeix pot arribar a ser molt gran. És per això que existeixen diverses formes de controlar aquest moment:
- Arrencada electrònica. El progrés de l’electrònica de potència ha fet que puguem controlar els paràmetres d’arrencada del motor a partir d’elements electrònics. En funció dels paràmetres del motor, l’arrencador electrònic controla la tensió i corrent subministrats al motor amb la qual cosa podem fer una arrencada progressiva en què la fcem va augmentant fins que se situa en els seus valors nominals.
- Reòstat d’induït. S’insereix un reòstat (resistència variable) en sèrie amb l’induït. En el moment de l’arrencada estarà al màxim del seu valor, amb el qual reduirà el corrent que absorbeix. Un cop ha començat a girar el motor, es genera la fcem en el seu interior, de manera que redueix el corrent absorbit. En aquest moment, reduïm el valor del reòstat amb la qual cosa augmentarà la velocitat del motor i també la seva fcem. Haurem de seguir aquest procediment fins que arribem al valor nominal i el reòstat se situarà al mínim, perquè la seva intervenció ja no caldrà(figura).
Exemple de configuració del reòstat d'arrencada
Disposeu d’un motor amb excitació en sèrie que es connecta a una font d’alimentació de contínua de 250 V. Si sabem que la resistència de l’induït és d’1 Ω i la de l’inductor de 0,5 Ω, que absorbeix un corrent de 5 A, i que hi ha una caiguda de tensió d’1 V a cadascuna de les escombretes. Calculeu:
- El corrent d’arrencada quan no hi ha connectat cap reòstat.
- El valor del reòstat a instal·lar per limitar el corrent d’arrencada a 8 A.
Solució:
- Sabem que en el motor, en el moment de l’arrencada, no està girant, i per tant, no genera cap fem. Per tant, podem plantejar l’equació, suposant que no està connectat el reòstat:

- Ara tornem a plantejar la mateixa equació, però tenint en compte que tenim el reòstat connectat i aïllem el valor de Ra:

Ara substituïm imposant que el corrent d’arrencada sigui de 8 A:

Instal·lant-li un reòstat de 29,5 Ω a aquest motor, limitarem el corrent d’entrada a 8 A. Una vegada comenci a arrencar, anirem disminuint el valor del reòstat amb el que el motor anirà accelerant-se i produint una fem interna que limitarà el corrent que absorbeix el motor. Repetirem aquest procés fins a que el motor funcioni en els seus paràmetres nominals.
Altres tipus de motors
Els darrers avenços tecnològics han permès l’aparició d’altres tipus de motors de corrent continu, basats en principis físics que fa anys no es podien aplicar en aquest camp.
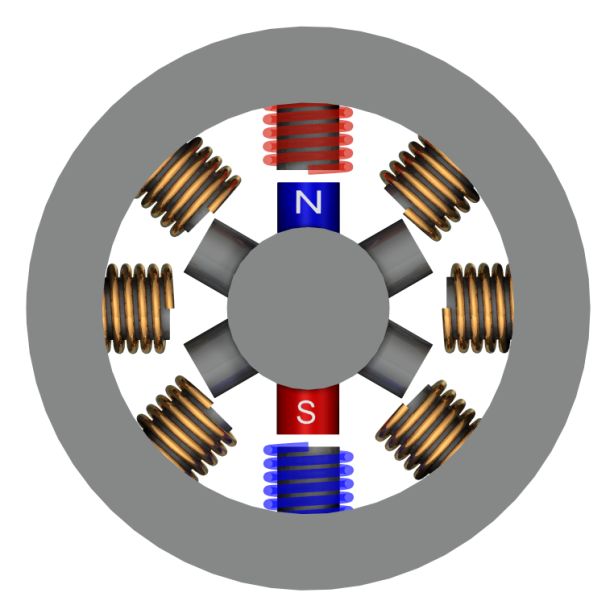
Motors d’imants permanents
Aquests motors estan construïts mitjançant imants permanents fets de terres rares com pot ser el neodimi. Aquests imants es col·loquen a l’estator, creant un intens camp magnètic (figura), mentre que el rotor està realitzat amb bobinats de manera molt semblant als ja estudiats, i que acaben també a un col·lector de delgues.

El principi de funcionament és el mateix que el que hem explicat anteriorment. El camp magnètic creat pels imants permanents fent-hi interaccions amb el corrent que es fa circular pel rotor (que efectivament té un aspecte molt més convencional: veure figura. Així, es crea un parell que fa girar el motor.

Aquests motors es fan servir en joguines i elements que requereixen poca potència i tenen l’avantatge de ser fàcils de construir i barats.
Motors brushless
Un dels grans problemes dels motors de corrent continu prové del fet que en utilitzar escombretes aquestes acostumen a desgastar-se, a més de deixar una pols sobre el col·lector de delgues que fa que les connexions elèctriques es deteriorin.
Avui en dia existeixen motors de corrent continu sense escombretes els quals habitualment s’anomenen brushless (figura). Aquests motors tenen una gran fiabilitat i eficiència, i per exemple, són els utilitzats en vehicles de mobilitat personal.

En aquests motors, s’eliminen les escombretes i el col·lector de delgues. Típicament es munten amb uns imants permanents al rotor, mentre que l’estator disposa de diverses bobines que crearan el camp magnètic. Alimentant convenientment aquestes bobines aconseguirem un camp magnètic rotatiu que arrossegarà el rotor. Noteu que abans un rotor composat d’una sèrie de debanats girava a dintre d’un estator immòbil i ara aquests debanats no es mouen i fan girar la part externa del muntatge el qual té uns imants fixes.
L’alimentació del motor es farà amb l’ajuda de l’electrònica, ja que l’estàtor incorpora el control i inversor que proporciona al motor els corrents necessaris per crear el camp magnètic giratori.
Motors pas a pas
Un motor pas a pas és un motor que permet controlar acuradament l’angle de gir del rotor de manera que podem saber en cada instant de temps la posició o el gir que ha realitzat.
El més comú d’aquest tipus de motors està realitzat per uns pols magnètics que es situen al rotor i un nombre de bobines a l’estator que s’encarregueran de crear un camp magnètic, com es veu a la figura. En funció de la direcció del camp magnètic resultant, el rotor s’orientarà al que tindrem un moviment en passos.
La quantitat d’angle que es pugui moure el rotor dependrà de la quantitat de diferents direccions de camp magnètic que puguem crear. Per fer-ho, s’aplica a les bobines de l’estàtor uns polsos de corrent. Aquest control s’efectua normalment amb l’ajuda d’un controlador del motor pas a pas.
Aquests motors els podeu trobar normalment en aplicacions de poca potència, però que requereixen un control precís de la posició del motor a un preu raonable. Són molt comuns, per exemple, en impressores 3D. N’existeixen de diverses mides, com es pot veure a la figura.
