


Operació dels motors de corrent altern
Consideracions prèvies al treball amb màquines trifàsiques
Connexió dels bobinats
Com ja sabeu de l’anterior unitat, les càrregues trifàsiques es poden connectar dues dues maneres. Recordem-les ara:
La tensió de línia es defineix com la tensió que mesurem entre dues línies. En canvi, la tensió de fase és la tensió entre qualsevol de les línies i neutre. La seva relació és:

Aquestes tensions depenen de la xarxa de distribució, no de les càrregues que hi connectem.
La intensitat de línia és la intensitat que circula per la línia d’alimentació, mentre que la intensitat de fase és la intensitat que circula per cadascuna de les càrregues. Les podem calcular amb la llei d’Ohm. Els valors seran diferents si les càrregues estan en estrella o en triangle.
Connexió en estrella
En una configuració en estrella, les càrregues es connecten entre línia i neutre com podeu veure a la figura.
Per tant, les càrregues estan sotmeses a la tensió de fase.
En els casos en que la càrrega estigui equilibrada, és a dir, les tres impedàncies Z siguin iguals, les intensitats que circularan per elles seran iguals però desfasades 120º, de manera que quan arribin al nus on es troben tots el corrents, es sumaran, donant 0 A. En aquests casos, no és necessari connectar al neutre.
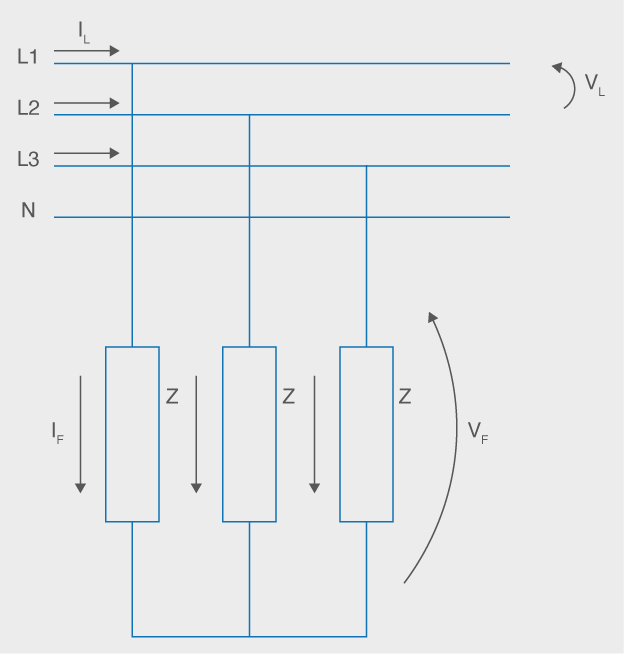
A més, per les càrregues circularà tot el corrent que els arriba per la línia, és a dir:

Aquest corrent vindrà donat per la llei d’Ohm. Com les càrregues estan sotmeses a una tensió VF:
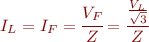
Connexió en triangle
En el cas de la connexió en triangle, les càrregues es connecten entre dues línies, com es veu a la figura.
Per tant, estan sotmeses a la tensió de línia VL. El corrent que circularà per les càrregues vindrà donat per la llei d’Ohm:

Aquest corrent està relacionat amb el corrent de línia per l’expressió:

El contactor
Tot i haver fet aquesta petita introducció als contactors en la passada unitat, repetirem aquí el més important per poder-ho refrescar ràpidament de cara als motors trifàsics.
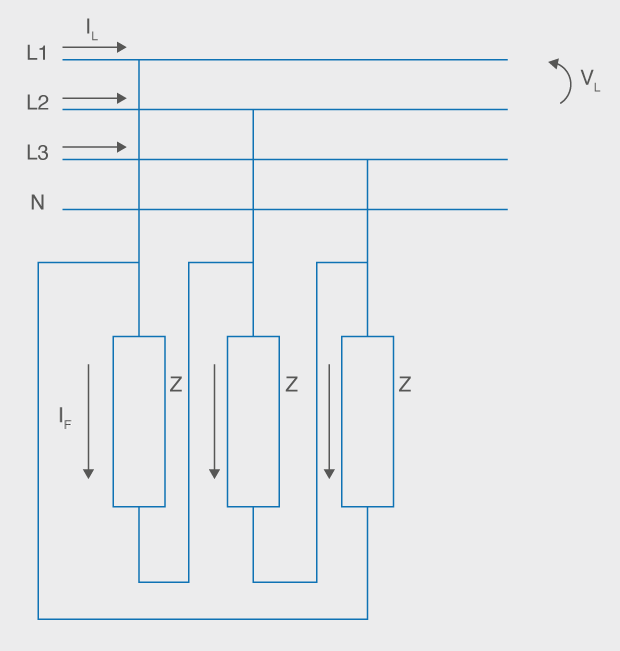
Podem dir que el contactor està format per tres parts ben diferenciades:
- Electroimant: és l’element de control dels contactes. Quan fem circular un corrent per la seva bobina, crea un camp magnètic que el fa actuar com un imant, de manera que fa commutar tots els altres contactes. Els seus borns són A1 i A2.
- Contactes principals: són els contactes de potència, per tant, el motor es connectarà directament a ells. Com estem treballant amb corrents trifàsics, existeixen tres contactes que s’obren i tanquen a la vegada, un per cada fase. Els seus borns són 1 i 2, 3 i 4, i 5 i 6, de manera que quan s’acciona l’electroimant, es posen en contacte els borns 1-2, 3-4, i 5-6.
- Contactes auxiliars: són contactes que s’utilitzen per als circuits de control. Igual que els contactes principals, no són més que interruptors que commuten quan s’actua sobre l’electroimant i que tornen a la seva posició de repòs quan es deixa d’actuar. En aquest cas, els borns porten dos números: un que ens diu el número de contacte, i l’altre que ens diu si és normalment obert o normalment tancat. 1-2 ens diu que el contacte és normalment tancat, mentre que 3-4 ens diu que normalment obert. Per exemple, un parell de contactes auxiliars 11-12 ens diu que el primer contacte auxiliar és NT, mentre que 23-24 ens diu que el segon contacte auxiliar és NO.
Normalment obert (NO) vol dir que en condicions de repòs l’interruptor està obert i no hi ha contacte entre els terminals. Al contrari, normalment tancat (NT, NC en castellà i anglès) vol dir que els contactes de l’interruptor estan tancats en condicions de repòs.
Els contactors es denominen KMx, on x és el número de contactor en el circuit. A la figura podeu veure el símbol utilitzat per als contactors.
Borns de connexió
Els motors d’inducció de gàbia d’esquirol tenen tres bobinats a l’estator que són els que tenen connexió elèctrica a l’exterior. Aquests bobinats s’identifiquen amb les lletres U, V i W, i els seus extrems amb els números 1 i 2. D’aquesta manera, que és un estàndard, es facilita molt la seva connexió.
Connexió en estrella
La connexió en estrella es realitza com es veu a la figura. A l’esquerra teniu l’esquema elèctric i a la dreta una representació dels borns a la caixa de connexió.
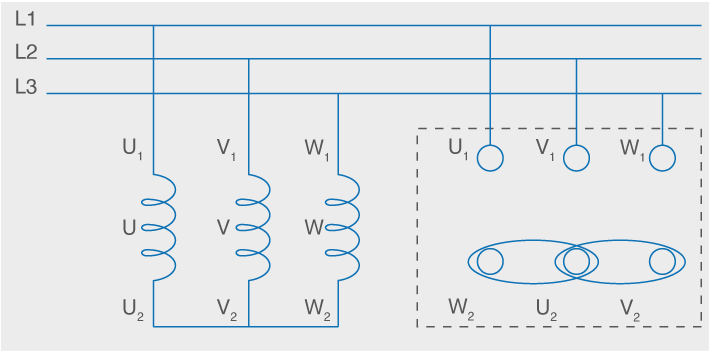
Les connexions dels borns es fan mitjançant uns contactes metàl·lics que el fabricant proporciona amb aquest fi.
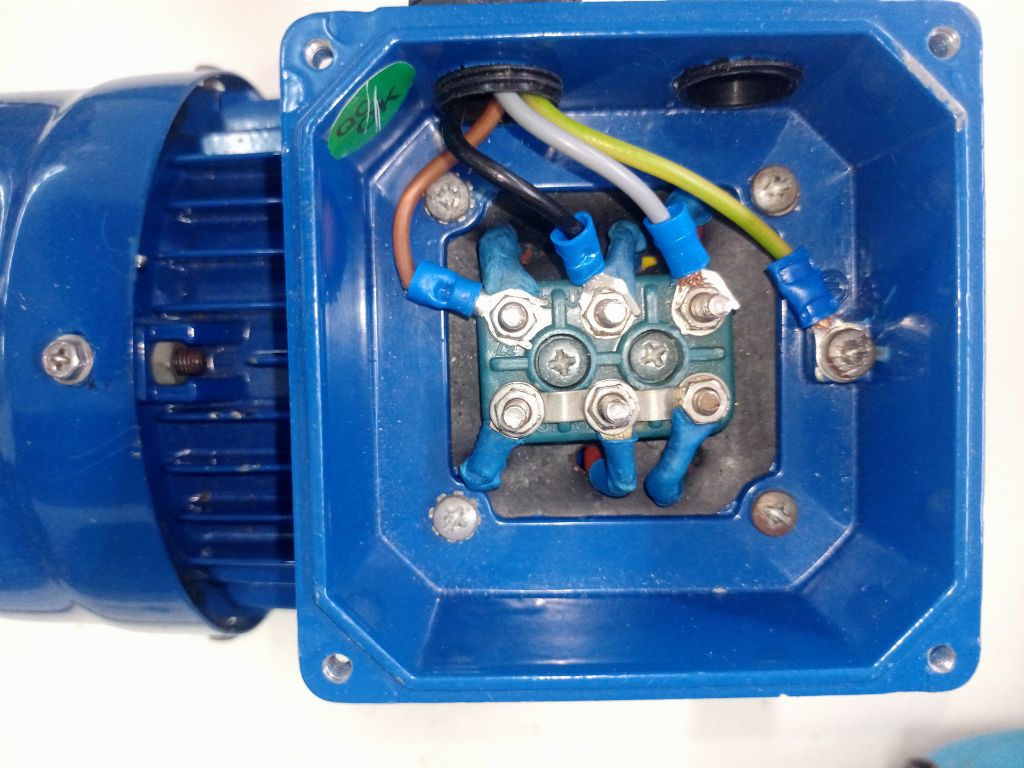
A la Figura podeu veure la imatge de la caixa de connexió d’un motor de gàbia d’esquirol.
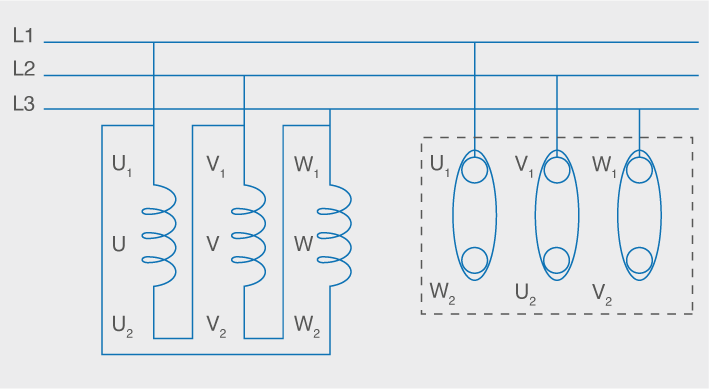
Connexió en triangle
En aquest cas, les plaques metàl·liques es connecten en vertical. Els extrems de les bobines ja estan col·locats de manera que en fer aquesta connexió ens quedaran en triangle Vegeu l’esquema d’aquest tipus de connexió a la figura.
Arrencada de motors d'alterna
L’arrencada és un moment crític per als motors, ja que en aquest moment s’indueixen corrents molt alts, que comporten fem també molt altes que poden destruir el motor o els conductors de connexió. És per això que existeixen diversos mètodes per l’arrencada del motor. Sempre s’haurà d’escollir aquell que no comporti cap perill per la instal·lació i que compleixi amb la legislació vigent. En el nostre cas, s’haurà de consultar la ITC-BT-47, que especifica el corrent màxim d’arrencada per als motors d’alterna en múltiples del corrent nominal a plena càrrega (vegeu la taula).
| Pot. nominal del motor (kW) |  |
|---|---|
| 0,75 a 1,5 | 4,5 |
| 1,5 a 5 | 3,0 |
| 5 a 15 | 2,0 |
| Més de 15 | 1,5 |
En tots els circuits que es mostren a aquest apartat, per senzillesa i comprensió, no s’han fet ús dels aparells de protecció com serien diferencials, magnetotèrmics, relés tèrmics, i fusibles. No obstant, cal recalcar que tots els elements haurien d’estar correctament protegits.
Arrencada en directa
A l’arrencada en directa, es connecten els bobinats en estrella depenent de la connexió desitjada, i del motor i tensió de línia disponible, i s’alimenta el motor directament de la tensió de línia, tal com es veu al circuit de la figura.
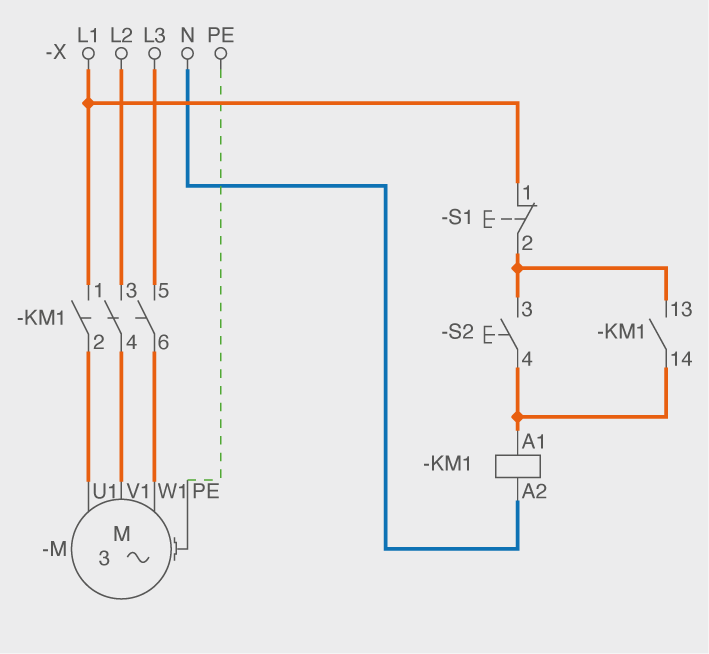
En aquest circuit, quan S2 es tanca alimenta l’electroimant de KM1, que fa commutar tots els seus contactes. L’electroimant resta activat per la realimentació realitzada pels seus contactes auxiliars 13-14, mentre que el motor arrenca ja que s’ha connectat a través dels contactes principals de KM1, que són 1-2, 3-4, i 5-6.
Si volem aturar el motor, premerem el polsador S1, de manera que la bobina de KM1 quedarà sense alimentació, i commutaran tots els seus contactes, tornant a la posició de repòs. Aquest sistema comporta un corrent d’arrencada elevat, per tant només s’utilitza per motors de baixa potència.
Arrencada estrella-triangle
Per tal d’evitar els corrents elevats a l’arrencada, una estratègia molt comú és l’arrencada estrella-triangle. Amb aquesta configuració, les bobines del motor es connecten inicialment en estrella, de manera que les tensions als bobinats de l’inductor són les tensions de fase. Un cop ha arrencat, commutem les bobines a triangle, de manera que queden connectades a les tensions de línia, perquè el motor quedi funcionant als seus valors nominals. Vegeu l’esquema de connexió a la figura.
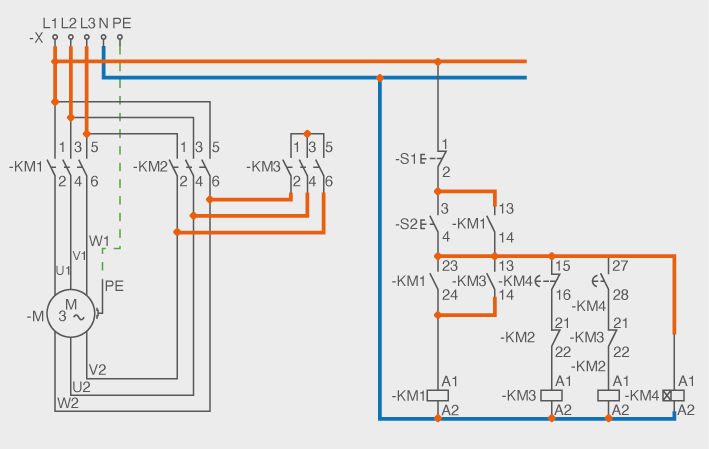
Al circuit de potència disposem de tres contactors, de manera que KM1 alimenta un dels extrems dels bobinats dels motors. Si es tanca KM2 els bobinats queden connectats en triangle, mentre que si es tanca KM3 resten en estrella.
En prémer S2, s’inicia la seqüència d’arrencada. La bobina principal de KM1 s’alimenta i resta en aquest estat a través dels contactes 13-14 i 23-24 de KM1. A més, la bobina principal de KM3 també està alimentada a través dels contactes 15-16 de KM4 i 21-22 de KM2, amb la qual cosa el motor està connectat en estrella.
La bobina principal de KM4, que té un retard a la connexió, també queda alimentada. Un cop s’arriba al temps de la connexió, els contactes de KM4 commuten, de manera que 15-16 s’obren i 27-28 es tanquen. D’aquesta manera, deixa d’alimentar-se KM3 i s’alimenta la bobina de KM2 a través de 27-28 de KM4 i 21-22 de KM3. Al circuit de potència, el que veiem és que els contactes principals de KM3 s’han obert, i els contactes principals de KM2 s’han tancat, de forma que haurem aconseguit connectar el motor en triangle.
Arrencada amb arrencador electrònic
L’arrencador electrònic fa una arrencada progressiva del motor, de manera que eleva la tensió paulatinament fins arribar als valors nominals. El temps que triga en arribar és configurable. D’aquesta manera, en realitzar una arrencada suau i progressiva, evitem generar grans corrents.
A la figura podeu veure l’esquema d’aquest sistema:
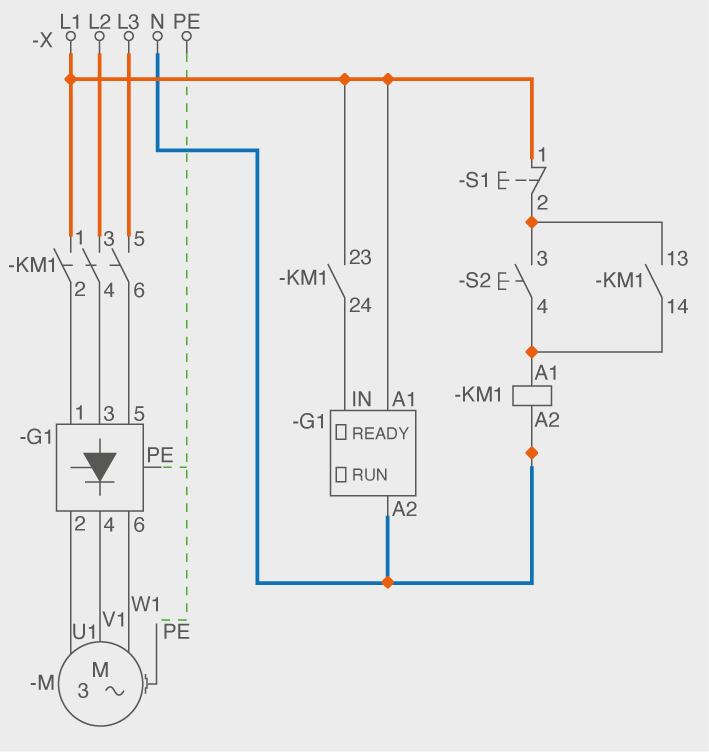
És un esquema molt semblant a una arrencada directa, però ara hem inserit un arrencador electrònic G1. Aquest dispositiu consta d’una part amb dispositius d’electrònica de potència que permet controlar la tensió que proporcionem al motor. Aquesta part de potència està controlada per la part de control, de manera que inicia la seva seqüència d’arrencada quan rep senyal a l’entrada IN.
Per fer l’arrencada amb aquest sistema, premem S2, de manera que la bobina de KM1 resta alimentada. Els contactes principals commuten, de manera que queda connectada l’etapa de potència de G1, i els contactes 23-24 de KM1 també es tanquen, de manera que li diem a l’arrencador que iniciï la seqüència. A partir d’aquest moment, el G1 anirà augmentant la tensió que proporciona al motor en el temps prèviament establert.
Inversió de gir en motors d'alterna
La inversió de gir del motors d’inducció es realitza intercanviant dues de les seves fases al bobinat del motor. Un possible esquema seria el mostrat a la figura.
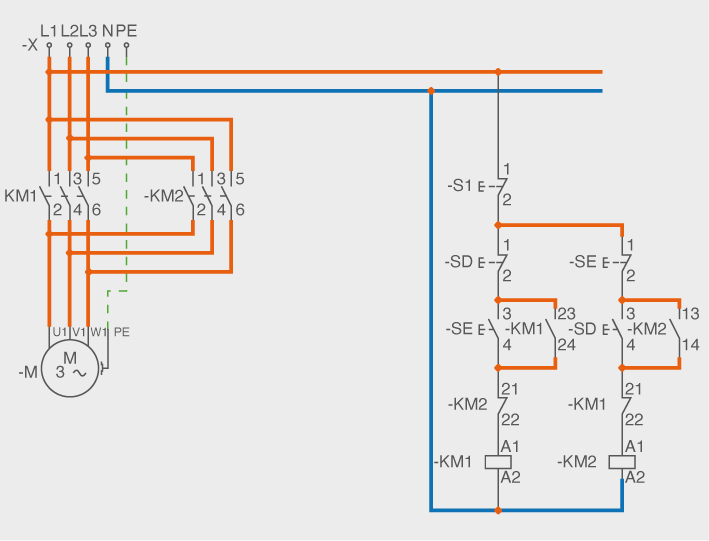
L’intercanvi de les dues fases es fa a través de KM1 i KM2. Si funciona el primer girarà cap a un constat, però quan entri KM2 (i es desactivi KM1), es produeix l’intercanvi de dues fases i el motor girarà cap a l’altre costat.
Per controlar aquest circuit necessitem un parell de polsadors que disposin de contactes NO i NT, com són SD i SE. Així, per arrencar el motor, podem prémer SD, de manera que KM2 quedarà alimentat. Si volem invertir el sentit de gir, haurem de prémer SE, amb la qual cosa KM2 es desconnectarà i quedarà alimentada la bobina de KM1.
Regulació de velocitat
La regulació de velocitat ha estat un dels desavantatges que han tingut tradicionalment els motors de corrent altern respecte els de corrent continu. Recordeu que la velocitat del motor ve forçada, per dir-ho d’alguna manera, per la velocitat de sincronisme, que té la següent expressió:

Per tant, només depèn de la freqüència del senyal f, que tradicionalment ve determinada per la xarxa, i del nombre de parells de pols, p, que és un paràmetre constructiu dels motors i no és fàcilment modificable.
Existeixen uns motors, anomenats Dahlander que ens permeten jugar amb el nombre de parell de pols, a través d’una circuiteria que alimenta o no uns bobinats extres, de manera que podríem jugar amb un paràmetre p amb dos possibles valors.
Una altra manera de canviar la velocitat de rotació és amb paràmetres mecànics. És a dir, acoblar un sistema mecànic reductor, de manera que disminueixi la velocitat al sistema que nosaltres desitgem. Però val a dir que aquesta no és una solució elèctrica, sinó mecànica.
Avui en dia, i amb els dispositius electrònics de potència existents, és molt fàcil controlar la velocitat dels motors d’inducció a través dels variadors de freqüència. Són elements electrònics similars als arrencadors suaus, però permeten un control més extens del comportament del motor. Per controlar la velocitat de gir juguen amb la freqüència f dels senyals que es proporcionen al motor, de manera que aquest paràmetre pot anar des de 0 a 50 Hz (en alguns casos inclús més).
A més, fan el control de l’arrencada de la mateixa manera que ho fan els arrencadors suaus, mitjançant rampes d’acceleració en què es va augmentant la tensió del motor a mida que agafa velocitat.
Permet controls més exactes encara, com per exemple, el manteniment d’un parell motor constants per diverses velocitats.
Aquests dispositius són avui en dia els més utilitzats pel controls del motors d’inducció ja que en permeten un control total.