


Màquines elèctriques de corrent continu
Les màquines rotatòries de corrent continu són màquines que o bé aprofiten un moviment de gir per generar energia elèctrica de corrent continu, o bé a partir d’un corrent continu generen un moviment rotatori, i es poden classificar en diferents tipus en funció de quin tipus d’energia accepten a l’entrada i lliuren a la sortida.
Cal dir que com totes les màquines elèctriques, són màquines reversibles, és a dir, podem intercanviar l’energia d’entrada amb la de sortida
Veurem quins són els principis físics que les fan treballar, cosa que ens ajudarà a entendre des de la manera de fer-les funcionar per a les nostres necessitats fins al manteniment que puguin necessitar.
Introducció a les màquines de corrent continu
Començarem examinant de quins tipus de màquines de corrent continu disposem i quines són les seves parts.
Classificació de les màquines elèctriques de corrent continu
Les màquines elèctriques de corrent continu les podem classificar en dos tipus, d’acord amb la figura:
- Generadors de corrent continu, que també reben el nom de dinamos. En aquestes màquines, l’energia d’entrada és mecànica i l’energia de sortida és elèctrica.
- Motors de corrent continu. Als motors l’energia d’entrada és elèctrica mentre que l’energia de sortida és mecànica.

Penseu, posem per cas, que a un generador es pot connectar una turbina a una central elèctrica que es pot moure per l’acció de la caiguda de l’aigua, per exemple, o a unes pales d’un aerogenerador. Aquesta energia mecànica li la proporcionarem al generador en forma d’energia mecànica rotativa i la màquina ens proporcionarà pels seus terminals una energia elèctrica.
En canvi, un motor de corrent continu el connectarem a una font de corrent continu, de manera que l’acció del corrent elèctric que absorbeix proporcionarà una energia mecànica rotativa.
Sigui com sigui, les màquines elèctriques de corrent continu són màquines reversibles. Aquesta és una característica que mencionarem més vegades en aquesta unitat, així que convé conèixer-la.
Una màquina elèctrica és reversible si les energies d’entrada i sortida es poden intercanviar i la màquina pot funcionar.
Això, aplicat a una màquina de corrent continu, vol dir que podem fer treballar la mateixa màquina com a generador o com a motor.
Parts d’una màquina elèctrica de corrent continu
Les màquines elèctriques de corrent continu tenen dues parts clarament diferenciades:
- Rotor (figura): és la part mòbil del motor. Penseu que un dels tipus d’energia amb què tractem és la mecànica, per tant, ha d’existir una part que sigui mòbil. Aquesta part mòbil està composta per:
- Nucli ferromagnètic o armadura. Format per una sèrie de làmines (imatge a de la figura) aïllades elèctricament entre sí, i que es disposen sobre l’eix.
- Bobinats rotòrics. Bobinats que s’estenen per les ranures de l’armadura de manera que cada extrem finalitza a una delga.
- Eix. Peça metàlica cilíndrica que realitza la funció de suport de l’armadura.
- Coixinets. Element mecànic que permet el moviment giratori amb un mínim de fricció. La part interna se situa sobre l’eix i l’externa sobre la carcassa de l’estator.
- Col·lector de delgues. Conjunt de delgues, aïllades entre sí, sobre el qual llisquen les escobetes. A cada delga finalitza un dels extrems dels bobinats rotòrics.

- Estator: és la part estàtica del motor. Està formada per:
- Carcassa. Proporciona subjecció als pols magnètics, a més de proveir un camí pel flux magnètic. Normalment està fabricada de ferro colat, proporciona una alta resistència mecànica.
- Pols magnètics i expansió polar. Fabricats de ferro colat o algun altre material ferromagnètic, constitueixen els nucles dels bobinats estatòrics. Estan dissenyats de manera que s’acoplen perfectament a la carcassa, a la qual estan subjectes, i units amb les expansions polars, amb forma semicircular que s’adapta a l’armadura, fent que l’entreferro sigui el més petit possible, però sense arribar mai a tocar-se.
- Bobinats estatòrics. Bobines sobre els pols magnètics, són els encarregats de crear el bobinat excitador.
- Debanats de compensació. Bobinats extres que s’afegeixen per compensar el camp magnètic de reacció a l’induït, molt semblants als pols principals, però normalment de més petita grandària.
- Escombretes i portaescombretes (figura). Peces de carbó o grafit que llisquen sobre el col·lector de delgues, permeten la connexió elèctrica amb els bobinats rotòrics. Se situen sobre els portaescombretes, que al seu torn van fixats sobre la carcassa, així, es pot regular la pressió que fan les escombretes sobre el col·lector de delgues.

A la figura podeu veure un esquema a tall de tall frontal del conjunt complet format pel rotor i l’estator.

Circuit magnètic a una màquina de corrent continu
S’ha vist que perquè un generador de corrent continu treballi s’ha de crear un camp magnètic al seu estator. Les línies de camp magnètic indiquen la direcció i la intensitat del camp en cada punt de la màquina. Amb les següents consideracions:
- Les línies de camp sempre es tanquen sobre sí mateixes.
- Les línies de camp indiquen la direcció del camp magnètic.
- A més concentració de línies de camp, més intensitat de camp magnètic.
Així, podem establir el circuit magnètic com al recorregut de les línies de camp magnètic les quals podeu veure a la figura que representa un tall transversal del motor. Aquest camp magnètic està creat per les bobines excitadores.

Funcionament com a generador
El funcionament del generador es basa en una de les lleis físiques més importants que veureu mentre curseu aquest cicle formatiu: la llei de Faraday.
Per il·lustrar-la, us proposem l’experiment de la figura en el qual podem observar una bobina fixa en la que tenim un voltímetre connectat als seus extrems i un imant mòbil.

Comencem el procediment per esbrinar què succeeix en els diferents moments descrits a la figura:
- Amb els dos elements allunyats i sense moure’s, com a dalt a l’esquerra de la imatge. En aquests moments, el voltímetre marca 0 V.
- Ara, movem l’imant cap a la bobina a una velocitat constant (a dalt a la dreta). En aquests moments, el voltímetre marcarà un valor diferent de 0 V, per exemple, de valor positiu.
- Una vegada l’imant ha arribat a tocar la bobina, l’aturem (com a baix a l’esquerra). En aquests moments, el voltímetre torna a marcar 0 V.
- Tornem a moure l’imant cap a la posició original, com abans, a una velocitat constant però ara en sentit contrari. Ara, el voltímetre torna a marcar un valor diferent de 0 V. Però, si abans era un valor positiu, ara serà negatiu.
- Una vegada arribat al punt original, aturem l’imant. Una altra vegada, el voltímetre torna a marcar 0 V.
D’aquest experiment, podem concloure que existeix una relació entre electricitat i magnetisme, com ja havíeu constatat a l’anterior unitat formativa. A més, veiem que si el flux magnètic que veu una bobina és variable, és a dir, canvia de valor amb el temps (com passava en aproximar o allunyar l’imant de la bobina), es genera una força electromotriu (un voltatge) en els seus extrems. Matemàticament:
Exemple de càlcul de la //fem// d'un sistema bobina-imant
Una bobina rep inicialment un flux magnètic de 5 Wb. Comença a moure’s a una velocitat constant, i quan han passat 10 segons, ja no rep cap flux magnètic. Quina serà la força electromotriu generada als seus extrems?
Solució:
Uilitzant l’expressió de la fem que hem vist anteriorment, podem calcular-la mitjançant la diferència entre els valors del flux final i inicial, i el temps que ha trigat en fer aquest canvi:

Per últim, penseu que el flux magnètic pot variar tant canviant el valor del camp magnètic B com la superfície efectiva de la bobina. Així doncs, la quantitat de flux magnètic que travessa una espira no és la mateixa si l’orientació de l’espira canvia envers la direcció del flux.
Per exemple, considerem un flux magnètic B en una direcció concreta (un vector, en definitiva), i una espira de superfície S. Podem pensar en un vector associat a aquesta superfície S amb direcció perpendicular a aquesta. Si mireu la figura tenim tres valors diferents de quantitat de flux que travessa l’espira (per al mateix camp magnètic) depenent de la posició de l’espira.

Matemàticament, podem calcular el flux com:

On B és el valor del camp magnètic en Tesla (T), S la superfície en m2, i θ l’angle que formen B i S.
- A l’esquerra de la imatge, podeu comprovar que cap línia de camp magnètic travessa l’espira, o el que és el mateix, θ = 90º. Per tant, el flux és nul.
- A la dreta, l’angle que formarien seria de 0º, ja que l’espira està perfectament orientada amb el camp. Per tant, el flux és B·S.
- A la situació del mig en tenim una d’intermèdia: el valor a cada posició dependrà de l’angle que formen en cada moment B i S.
Principi de funcionament
Ara que ja coneixem la llei de Faraday, és pràcticament immediat arribar al funcionament d’un generador de corrent continu. Per això, plantegem-nos un esquema com el de la figura.

Creem un camp magnètic constant i uniforme, en aquest cas, amb uns imants permanents fixes enfrontant els seus pols magnètics. Així, el camp magnètic B anirà del pol nord al pol sud. Enmig d’aquest espai situem una espira, de manera que aquesta pot girar sobre el seu eix a una velocitat angular ω.
Velocitat angular
Recordeu que la ω es diu velocitat angular perquè expressa la quantitat d’angle per segon que gira. L’angle es podria mesurar en graus, però al Sistema Internacional es mesura en radians, de manera que la velocitat angular ω es mesurarà en rad/s.
L’equivalència entre graus i radians és 360º = 2·π rad.
Doncs bé, si d’alguna manera aconseguim fer girar l’espira a una velocitat angular ω, l’espira veurà un flux magnètic variable, ja que l’angle que formen el camp magnètic i la superfície varia a raó de ω·t, com podeu veure a la figura.
D’aquesta manera, si col·loquem un oscil·loscopi als extrems de l’espira, veurem un senyal com el de la part inferior de la figura.
Però, ja podeu veure que tenim un problema! Estàvem cercant un corrent continu, però tenim un corrent de senyal altern. Per tant, encara hem de fer alguna cosa. Col·loquem una parell de peces (anomenades escombretes) com les de la figura, de manera que el voltímetre mesura la tensió d’aquestes peces, mentre que als extrems de la bobina tenim un parell de contactes (anomenats delgues, que giren amb ella) que toquen aquestes escombretes, de manera que hi ha un moment que els contactes de l’espira canvien l’escombreta que toquen.

Al realitzar aquest muntatge, ara el voltatge que tindrem a la sortida serà el de la part inferior de la figura. Com veieu, hem aconseguit un corrent rectificat!
Si augmentéssim el número d’espires i de contactes, l’efecte seria millor i aconseguiríem un corrent pràcticament constant. Fixeu-vos que hem aconseguit fabricar un generador de corrent continu!
Funcionament d’un generador de corrent continu
Ara que ja sabem el principi de funcionament d’un generador de corrent continu i les seves parts, ja podem unir-ho tot per explicar com són en realitat.
Qui s’encarrega de crear el camp magnètic constant són les bobines estatòriques juntament amb els pols magnètics. Fixeu-vos que les línies de camp magnètic es tancaran per la carcassa. Per crear aquest camp magnètic cal subministrar un corrent elèctric a aquestes bobines a través dels terminals J i K (figura).

Adoneu-vos que aquest procés per crear el camp magnètic és molt millor que situar uns imants permanents, ja que ens permet controlar exactament el camp magnètic a l’interior de la màquina per mitjà del corrent elèctric que subministrem.
Una vegada tenim el camp magnètic constant i uniforme generat, el que farem és fer girar les espires que tenim al mig. Fixeu-vos que cada espira finalitza a un parell de delgues, de manera que quan la fem genera una espira baixa, la del costat comença a generar una tensió més gran. El resultat és que si tenim diverses espires, tindrem a la sortida pels terminals A i B una tensió pràcticament constant. Si a aquest parell de terminals connectem un receptor, per exemple, una bombeta incandescent, aquesta s’encendrà.
Reacció de l’induït
Fins aquí tot sembla funcionar perfectament, però hi ha un detall que no hem tingut en compte que farà que hàgim de canviar lleugerament el disseny de la nostra màquina.
Com ja sabeu, un correu elèctric genera un camp magnètic. De fet, això ho hem utilitzat per generar un camp magnètic constant i uniforme a l’entreferro de la màquina. Però a més, tenim un altre corrent al nostre generador. Quan connectem una càrrega al nostre generador, aquest consumirà un corrent que circularà pel bobinat induït. A aquest corrent li direm Ii. El problema és que aquest corrent generarà un altre camp magnètic, que encara que serà petit, variarà la direcció i valor del camp magnètic a l’entreferro (figura).

Si no fem res, això provocarà espurnes al col·lector de delgues, ja que la línia neutra (aquella línia en què la tensió generada per l’espira és nul·la) haurà variat lleugerament de posició, com es mostra a la figura.

Per evitar les espurnes, podem girar lleugerament l’orientació de les escombretes, de manera que la commutació de les escombretes es produeixi just a sobre de la línia neutra.
Però, aquest sistema presenta un greu problema. Penseu que la desviació de la línia neutra depèn del camp magnètic generat per l’induït, i aquest al seu torn depèn del corrent que circula per l’induït. Però, com aquest corrent depèn de la càrrega que connectem al nostre generador, segons la llei d’Ohm per a diferents càrregues tindrem diferents posicions de la línia neutra. Això faria que segons la càrrega que connectem, hauríem de girar les escombretes proporcionalment, cosa que òbviament no fa factible aquest mètode.
Existeix, però, un mètode molt millor i que ens servirà per a qualsevol càrrega que connectem, el qual veurem tot seguit.
Debanat de compensació
Aquest mètode consisteix a inserir una nova bobina, anomenada debanat de compensació, que serà l’encarregada de produir un camp magnètic que cancel·li el camp magnètic produït per l’induït.
Aquest debanat es connectarà amb el circuit del debanat induït, de manera que ara produirà un camp magnètic proporcional al corrent que circula per l’induït. Per tant, per a diferents càrregues, tindrem valors diferents de corrent i també, del camp magnètic produït per aquest induït. Però a més, aquest corrent circularà pel debanat de compensació, de manera que produirà un camp magnètic proporcional al corrent. A més, aquest bobinat es farà de tal manera que sempre produeixi un camp magnètic que elimini el creat per l’induït. Podeu veure-ho a la figura.

Força electromotriu generada
Ara que ja sabem com funciona el generador de corrent continu, només ens faltaria saber quanta tensió genera. L’expressió matemàtica de la força electromotriu és:

A on:
- n: velocitat de rotació del rotor en rpm.
- Φ: flux per pol generat per les bobines estatòriques.
- K: constant que té en compte paràmetres constructius de la dinamo, com poden ser el número de conductors de l’induït, el número de bobines a l’induït i els parells de pols estatòrics.
El que és important és que ens adonem que com més velocitat, més gran serà la fem generada, i com més flux magnètic generat, també més gran serà la fem.
Exemple de càlcul de la //fem//
Calculeu la fem generada a una dinamo amb un flux per pol de 50 mWb i una velocitat de rotació del 1.000 rpm, si sabem que la constant K de proporcionalitat és de 15.
Solució:
Utilitzarem l’expressió de la fem generada:

Funcionament com a motor
Els motors de corrent continu són àmpliament utilitzats en petits electrodomèstics i joguines, però també a algunes indústries i al transport de ferrocarril.
El funcionament dels motors de corrent continu es basa en la força magnetoestàtica o força de Lorentz. Aquesta força dona compte dels efectes sobre una càrrega o intensitat elèctrica que circula per un conductor que està immers en un camp magnètic.
Vegem-lo. Fixeu-vos en la part esquerra de la figura, tenim un camp magnètic B amb direcció cap a la dreta i un tros de fil de longitud L pel qual circula un corrent I cap a dalt. En aquesta situació, el fil pateix una força perpendicular al camp i perpendicular al corrent que l’empenyerà lluny de nosaltres. Si ara, com a la imatge de la dreta, el corrent circula cap a baix, el fil patirà la mateixa força, però en sentit contrari, és a dir, l’empenyerà cap a nosaltres.

El càlcul del valor d’aquesta força el podem fer amb l’expressió:

A on:
- I: intensitat de corrent elèctric al fil (A)
- L: longitud del fil (m)
- B: intensitat de camp magnètic (T)
- θ: angle que formen la direcció de la intensitat I i el camp magnètic B
Si voleu saber la direcció de la força resultant, simplement heu d’aplicar la regla de la mà dreta (figura): si poseu el dit índex en el sentit d’I i el dit del mig en el sentit de B, el dit polze us apuntarà en sentit de la força. Fixeu-vos que la força sempre és perpendicular a I i també perpendicular a B.

Per finalitzar, fixeu-vos en uns detalls:
- La força serà màxima quan la direcció d’I i de B formin 90º, ja que sin(90º) = 1, i aquest valor màxim serà F = I·L·B
- La força serà mínima, en aquest cas nul·la, quan I i B vagin en la mateixa direcció (en realitat no importa el sentit), ja que tant sin(0) = 0 com sin(180º) = 0, i aquesta força mínima serà F = 0.
Principi de funcionament
Ara que ja coneixem la relació entre el camp magnètic, la intensitat de corrent que circula per un conductor i la força que pateix, ja podem comprendre com funciona un motor de corrent continu.
Recordeu que vam dir que les màquines de corrent continu són reversibles. Per tant, recuperem l’esquemàtic d’una màquina generadora de corrent continu, però ara connectarem una font d’alimentació contínua a l’espira central (figura).

Com dèiem, tenim un camp magnètic creat per un imant permanent i una espira quadrada que pot girar sobre el seu eix. El camp magnètic va d’esquerra a dreta i és uniforme i constant. En aquesta direcció, mirem cadascun dels costat de l’espira:
- Els costats verticals tenen direcció perpendicular al camp magnètic. A més, fixeu-vos que en un costat el corrent va cap a dalt i a l’altre costat va cap a baix. Per tant, sobre cadascun d’aquests costats es produeix una força F, de mateix valor, però en sentit contrari. Aquest parell de forces fa que l’espira giri sobre el seu eix vertical.
- Els costats horitzontals tenen corrents elèctrics que, o bé són paral·lels al camp magnètic, o bé produeixen forces que no fan moure’s de la màquina de posició. Per tant, la força magnètica sobre aquests costats és nul·la.
Com hem dit, l’únic moviment possible de l’espira és girar sobre el seu eix vertical. I si us hi fixeu, el parell de forces que actuen sobre els costats 1 i 3, que tenen sentit contrari, la faran girar. Quan l’espira hagi donat mitja volta, el conjunt format per les delgues i les escombretes farà canviar el sentit del corrent a l’espira i es crearà un parell de forces noves que continuarà fent-la girar. Ja tenim el nostre motor!
Funcionament d’un motor de corrent continu
El motor que hem explicat anteriorment seria un motor d’imants permanents. Aquests no són els més usuals, ja que no permeten controlar el camp magnètic que es genera a l’entreferro. Per conèixer el funcionament del motor de corrent continu recuperarem la Figura figura, que ens va servir per entendre el funcionament del generador.

Amb aquesta configuració, el camp magnètic generat a l’interior es genera amb els bobinats excitadors, és a dir, els que estan col·locats a l’estator sobre els pols magnètics i és proporcional al corrent que hi circula per ells: Iex.
D’altra banda, en compte de tenir una única espira, tenim diverses bobines, cadascuna col·locada en una posició determinada les quals acaben en un parell de delgues. Com que ara tenim un motor, hem de proporcionar corrent a l’induït, per això, entre els terminals A i R es connecta una font de corrent continu que proporcionarà el corrent a les bobines de l’induït a través de les delgues. En cada moment només per una de les bobines circularà el corrent de manera que serà aquesta la que proporcioni el parell de forces perquè el motor es mogui.
Igual que amb el generador, tindrem un camp magnètic creat per l’induït el qual farà necessari un debanat de compensació que anul·li aquest camp magnètic no desitjat que provocaria espurnes al col·lector de delgues.
Força contraelectromotriu
Igual que a la dinamo, a l’induït del motor també es genera una força electromotriu. Per diferenciar-la del generador, li direm força contraelectromotriu, que tindrà una expressió que segurament ja us sona:

A on, igual que amb la dinamo:
- n: velocitat de rotació del rotor (rpm)
- Φ: flux per pol generat per les bobines estatòriques
- K és una constant que té en compte paràmetres constructius de la màquina
Aquesta força contraelectromotriu es genera per efecte de la llei de Faraday. Fixeu-vos que tenim un conductor movent-se dins un camp magnètic. Per tant, a banda de la força de Lorentz que es genera, també apareix un voltatge, que en diem força contraelectromotriu.
Símbol del motor de corrent continu
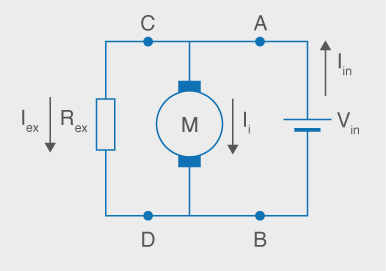
A la figura podeu veure el símbol del motor de corrent continu, i el seu circuit equivalent.

Com es pot veure al model, estan presents els següents elements:
- Força contraelectromotriu (ε), que és la tensió elèctrica que apareix al motor pel fet de girar, anàlogament a la força electromotriu que es genera en la dinamo.
- Debanat d’excitació (Rex).
- Debanat induït (Ri).
- Caiguda de tensió a les escombretes (Ve) del motor.
Balanç de potències
El balanç de potències d’una màquina és un estudi de totes les potències que hi intervenen: les d’entrada, les de sortida i les que es perden i a on es perden.
Per realitzar el balanç de potències d’una màquina de corrent continu hem de tenir en compte tots aquells aspectes on es pot produir una pèrdua energètica. En el cas d’una màquina de corrent continu aquestes pèrdues seran:
- Pmec: potència perduda per efectes mecànics com pot ser el fregament
- PFe: potència perduda degut a la dispersió del flux magnètic creat per les bobines inductores (pèrdues al ferro del nucli de les bobines)
- Pi: potència perduda per efecte Joule a l’induït, que podem calcular amb l’expressió

- Pex: potència perduda per efecte Joule a l’excitador, que a la seva vegada es pot calcular com

Balanç de potències a un generador
En el cas d’un generador, com hem dit, hi proporcionem potència mecànica. En aquesta energia mecànica es tramet l’eix del generador, i utilitzant el camp magnètic creat per les bobines inductores, es crea una força electromotriu a l’induït, que en ser un circuit tancat, generarà un corrent elèctric. Per tant, podem considerar l’esquema de la figura.

Fixeu-vos que es defineix la potència electromagnètica com la potència elèctrica generada a l’interior de l’induït una vegada hem tingut en compte les pèrdues mecàniques i el ferro.

Exemple de balanç de potències en un generador
Una dinamo lliura a la càrrega que té connectada una potència de 50 W. Si les potències perdudes per efecte Joule són de 5 W a l’excitador i de 2,5 W a l’induït i la suma de les potències mecàniques i magnètiques és 10 W, calculeu:
- La potència mecànica que es proporciona.
- El rendiment.
- La força electromotriu que genera sabent que el corrent per l’induït és 1 A.
Solució:
- La potència mecànica que li donem d’entrada a la dinamo va a parar a la càrrega i a les diverses pèrdues que té la dinamo. Per tant:

- Si utilitzem la definició de rendiment, podem trobar el seu valor:

- Hem definit la potència electromagnètica com la potència disponible després de tenir en compte les potències perdudes magnètiques i mecàniques. Per tant:

D’una altra banda, aquesta potència electromagnètica és:

Balanç de potències a un motor
Anàlogament, podem dibuixar el mateix esquema pel motor (figura). Ara, les potències d’entrada i sortida canvien i també l’ordre en el que es produeixen les pèrdues:

Exemple de balanç de potències en un motor de corrent continu
Disposeu d’un motor que proporciona 500 W a la sortida quan a l’entrada se li proporcionen 650 W. Calculeu:
- La totalitat de la potència perduda.
- El corrent que absorbeix si la tensió a l’entrada del motor és de 100 V.
Solució:
- La potència total perduda serà la suma de les potències perdudes. És a dir:

I sabem que la potència que li proporcionem a l’entrada va a parar a la potència a la sortida i a tota la suma de la potència perduda. Per tant:

- Si al motor li proporcionem 100 V i consumeix un total de 650 W, el corrent que absorbeix serà:

Velocitat de gir
La velocitat de gir és un paràmetre molt important dels motors, és el primer que es mira quan es necessita un motor per a una aplicació. Els fabricants ens proporcionen aquesta informació en condicions nominals. La unitat que utilitzen quan es parla de motors són les revolucions per minut (rpm), que es relaciona amb la velocitat angular ω en rad/s amb l’expressió:

Recordeu que la fem (o la fcem en cas dels motors) depèn de la velocitat a la qual gira el rotor:

Full i placa de característiques de motors de corrent continu
Els motors de corrent continu petits no acostumen a portar una placa de característiques com sí ho fan les màquines de corrent altern, o de contino més gran, com ja veurem.
No obstant això, podem buscar el full de característiques o datasheet a través del codi que proporciona el fabricant. Vegeu-ne un exemple a la figura.
Com veiem, hi podem trobar els paràmetres dels quals hem parlat i molts d’altres:
- Codi del fabricant (Part name)
- Dimensions físiques del motor (Diameter i Length), a més de les vistes de planta, alçat i perfil acotades
- Valors nominals (de funcionament normal) de voltatge, velocitat, parell motor i corrent (Nominal voltage, Nominal speed, Nominal torque i Nominal current)
- Valors de velocitat i corrent en buit, o sigui sense càrrega (No load speed i No load torque)
- Parell de bloqueig, o sigui quan la càrrega es tan gran que no deixa girar el motor (Stall torque)
- Corrent d’arrencada (Starting current)
- Potència de sortida (Output, no especifica amb la paraula power que sigui la potència de forma explícita, però se sap per les unitats en què la mesura W)
- Rendiment (Efficiency)
- Temperatura de funcionament (Operating temperature)

Vegeu un altre exemple de full de característiques de motors a la figura.

Si observeu aquest cas, hi tenim, entre d’altres paràmetres:
- Motor connectat en derivació (Shunt wound)
- Potència en CV (HP)
- Velocitat (RPM)
- Tensió de l’induït (Armature Volts)
- Tensió de l’inductor (Field Volts)
- Intensitat a l’induït (Armature Amps)
- Intensitat a l’inductor (Field Amps)
A la figura podeu observar una placa de característiques d’una màquina de cc que sí la presenta.

Com es pot observar, podem trobar les següents característiques:
- Per a l’induït:
- Tensió nominal
- Corrent nominal
- Velocitat
- Per a l’excitador:
- Forma de connexió
- Tensió
- Current
Tipus d'excitació de motors de corrent continu
Ara que ja sabem què són els motors de corrent continu, com funcionen, i quins paràmetres hem de considerar, només ens falta l’últim pas: connectar-los. Però, per fer-ho, encara haurem de tenir en compte diversos aspectes.
Hi ha dos tipus bàsics de màquines en funció de la seva connexió del bobinat excitador:
- Màquines d’excitació independent: el corrent d’excitació es proporciona a través d’una font externa diferent al circuit de l’induït.
- Màquines autoexcitades: el corrent d’excitació el proporciona l’induït, amb la qual cosa no cal una font d’excitació independent. En aquest cas, tenim tres possibles connexions que ens indiquen com estan connectats els bobinats excitadors i induït:
- Connexió en sèrie
- Connexió en derivació o shunt (paral·lel)
- Connexió compound (composta)
Les diferents maneres de connectar el bobinat d’excitació s’aconsegueixen mitjançant els diferents borns de connexió dels motors. Així, és important que coneguem la designació dels borns d’un motor de cc. En motors petits com els dels electrodomèstics no ens trobarem aquesta designació. Però, si ens trobem amb motors de potències grans, sí que els veurem. A més, en funció que el motor hagi estat dissenyant per a una connexió o una altra, la designació dels borns de l’induït poden tenir diferent nom.
La designació dels borns dels motors de cc segueix la taula:
| Borns | Bobinat connectat |
|---|---|
| A-B | Bobinat de l’induït |
| C-D | Bobinat d’excitació en derivació |
| E-F | Bobinat d’excitació sèrie |
| J-K | Bobinat d’excitació independent |
Motors d’excitació independent
Els motors d’excitació independent requereixen d’una font de tensió externa per generar el camp magnètic. L’esquema és com el de la figura.

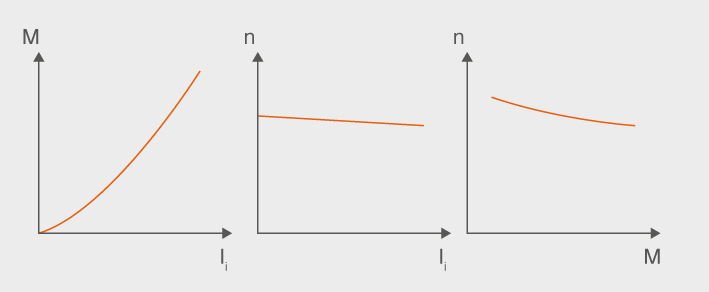
Les corbes característiques en aquesta configuració tenen la forma que es mostra a la figura.

Com podeu observar, el consum de corrent augmenta linealment amb l’augment de la càrrega del motor (M). Per contra, la velocitat és molt estable, tant si augmenta el corrent com si augmenta el parell, el que acostuma a ser una molt bona característica d’aquest tipus de configuracions.
Motors d’excitació derivació (shunt)
Als motors amb excitació en derivació s’hi connecta el bobinat excitador amb el bobinat induït, com es pot veure a la figura.
Si analitzem elèctricament aquesta configuració, veiem que:



Les corbes característiques en aquesta configuració tenen la forma que es mostra a la figura, que són ben bé com les dels motors d’excitació independent (almenys en termes qualitatius, com és el cas ara).
Com podeu observar, el consum de corrent augmenta linealment amb l’augment de la càrrega del motor (M). Per contra, la velocitat és molt estable, tant si augmenta el corrent com si augmenta el parell. Això acostuma ser una molt bona característica d’aquest tipus de configuracions.
Motors d’excitació sèrie
Als motors amb excitació en sèrie, la bobina de l’inductor i de l’induït es connecten en sèrie, com es veu a la figura.

Com es pot observar del circuit, el corrent total que s’absorbeix de la font és la mateixa que circula per l’excitador i per l’induït. Per tant:

I la relació entra la tensió d’entrada i la força contraelectromotriu és:

Les corbes característiques d’aquesta connexió tindran la forma que podeu veure a la figura.

Exemple de càlculs amb un motor sèrie
Disposeu d’un motor amb excitació en sèrie que es connecta a una font d’alimentació de contínua de 250 V. Si sabem que la resistència de l’induït és d’1 Ω i la de l’inductor de 0,5 Ω, que absorbeix un corrent de 5 A, i que hi ha una caiguda de tensió d’1 V a cadascuna de les escombretes, calculeu:
- La força contraelectromotriu que es genera.
- La potència que absorbeix.
Solució:
- Sabem que a un motor amb excitació en sèrie, el corrent que absorbeix és el mateix que el que circula per l’inductor i el l’induït. Per tant:

Ara podem fer ús de l’altra equació per calcular la fem:

D’aquí,

- La potència que absorbeix és de tipus elèctric, per tant, utilitzarem la fórmula genèrica d’elements de corrent continu:

Motors d’excitació compound
Els motors d’excitació compound o composta incorporen característiques de les dues connexions anteriors (sèrie i shunt o paral·lel). Així, generalment s’utilitzen quan es necessita un parell motor gran però al mateix temps es necessita una velocitat constant per a diferents càrregues. Per tant, són ideals per aplicacions de màquines grans on es produeixen canvis de càrrega freqüentment.
En aquesta configuració, la bobina inductora es divideix en dues parts. Una d’elles es connecta en sèrie i l’altra en paral·lel amb el bobinat induït. Existeixen dues maneres de fer aquesta connexió:
- Derivació curta
- Derivació llarga
D’aquesta manera obtindrem unes corbes característiques intermèdies entre la connexió en sèrie i connexió en paral·lel (figura).
Compound derivació curta
A la derivació curta, el bobinat d’excitació paral·lel, Rexd, es connecta en paral·lel amb l’induït, mentre que el bobinat d’excitació sèrie, Rexs, es connecta la sèrie amb tot el bloc anterior (figura).

En aquesta configuració l’anàlisi elèctrica ens proporciona les següents equacions:




Compound derivació llarga
En aquesta configuració, el bobinat d’excitació sèrie, Rexs, es connecta en sèrie amb l’induït. A continuació, el bobinat d’excitació en paral·lel, Rexd, es connecta en paral·lel amb tot el bloc anterior (figura).

En aquesta connexió tenim que:



Arrencada de motors de corrent continu
El corrent d’arrencada és un dels paràmetres més importants quan tractem amb motors. Succeeix que el corrent dels motors acostuma a ser molt gran, i sol ser necessari un corrent encara més gran per posar-los en moviment des de la posició de repós. Tingueu present que aquests motors s’han de connectar a l’alimentació elèctrica través de conductors i que necessàriament aquests han d’estar calculats perquè puguin aguantar el corrent que hi circula per ells en tot moment sense cremar-se.
És vital, per tant, conèixer quin serà aquest corrent d’arrencada.
Suposem que tenim un motor que encara no ha arrencat, per tant, el seu rotor és estàtic. Com que no es mou, no es genera fcem al seu interior. Per tant, el circuit equivalent és el de la figura.

Si apliquem la llei de les malles tenim que:

Fixeu-vos que ara el corrent que absorbeix l’induït li hem dit Ia, ja que és en el moment de l’arrencada. A més, si ho comparem amb l’expressió de l’apartat anterior, ja podeu entreveure que és molt més gran que el corrent que absorbeix una vegada el motor funciona normalment.
Exemple de càlcul del corrent d'arrencada
Calculeu el corrent d’arrencada del motor de l’exemple anterior, que s’alimentava amb 400 V, tenia una resistència d’induït de 4 Ω, i unes pèrdues a cada escombreta de 1,5 V.
Solució:
Utilitzarem l’expressió anterior:

Fixeu-vos que aquest corrent d’arrencada trobat és molt gran i a la pràctica és impossible poder trobar uns conductors que suportin aquest corrent. A més, si comparem amb el valor del corrent que absorbeix en condicions nominals, 8 A, és clar que l’arrencada és un moment crític i que és necessari reduir aquest corrent que absorbeix en aquell instant.
Sistemes d'arrencada
Ja hem comentat que l’arrencada del motor és un moment crític, ja que el corrent que consumeix pot arribar a ser molt gran. És per això que existeixen diverses formes de controlar aquest moment:
- Arrencada electrònica. El progrés de l’electrònica de potència ha fet que puguem controlar els paràmetres d’arrencada del motor a partir d’elements electrònics. En funció dels paràmetres del motor, l’arrencador electrònic controla la tensió i corrent subministrats al motor amb la qual cosa podem fer una arrencada progressiva en què la fcem va augmentant fins que se situa en els seus valors nominals.
- Reòstat d’induït. S’insereix un reòstat (resistència variable) en sèrie amb l’induït. En el moment de l’arrencada estarà al màxim del seu valor, amb el qual reduirà el corrent que absorbeix. Un cop ha començat a girar el motor, es genera la fcem en el seu interior, de manera que redueix el corrent absorbit. En aquest moment, reduïm el valor del reòstat amb la qual cosa augmentarà la velocitat del motor i també la seva fcem. Haurem de seguir aquest procediment fins que arribem al valor nominal i el reòstat se situarà al mínim, perquè la seva intervenció ja no caldrà (figura).

Exemple de configuració del reòstat d'arrencada
Disposeu d’un motor amb excitació en sèrie que es connecta a una font d’alimentació de contínua de 250 V. Si sabem que la resistència de l’induït és d’1 Ω i la de l’inductor de 0,5 Ω, que absorbeix un corrent de 5 A, i que hi ha una caiguda de tensió d’1 V a cadascuna de les escombretes. Calculeu:
- El corrent d’arrencada quan no hi ha connectat cap reòstat.
- El valor del reòstat a instal·lar per limitar el corrent d’arrencada a 8 A.
Solució:
- Sabem que en el motor, en el moment de l’arrencada, no està girant, i per tant, no genera cap fem. Per tant, podem plantejar l’equació, suposant que no està connectat el reòstat:

- Ara tornem a plantejar la mateixa equació, però tenint en compte que tenim el reòstat connectat i aïllem el valor de Ra:

Ara substituïm imposant que el corrent d’arrencada sigui de 8 A:

Instal·lant-li un reòstat de 29,5 Ω a aquest motor, limitarem el corrent d’entrada a 8 A. Una vegada comenci a arrencar, anirem disminuint el valor del reòstat amb el que el motor anirà accelerant-se i produint una fem interna que limitarà el corrent que absorbeix el motor. Repetirem aquest procés fins a que el motor funcioni en els seus paràmetres nominals.
Inversió de gir en motors de contínua
Si recordeu quan vam parlar del principi de funcionament del motor, aquest es basava en el fet que es produïen un parell de forces sobre els conductors de l’espira, el sentit de les quals venia donada per la regla de la mà dreta.
En concret, si el corrent elèctric i el flux de camp magnètic eren perpendiculars, la força anava en la tercera direcció. Doncs treballant sobre aquest principi, si canviem les direccions d’una de les dues magnituds, corrent o camp magnètic, és evident que les forces canviaran de sentit.
Per tant, per canviar la direcció de gir del motor, hem de dur a terme una de les següents accions:
- Canviar el sentit de circulació del corrent d’induït Ii.
- Canviar el sentit del camp magnètic generat, cosa que s’aconseguiria canviant el sentit de circulació del corrent d’excitació Iex.
El contactor
El contactor és un element electromecànic que ha estat i és àmpliament utilitzat en automatització. En allò que respecta als motors, s’utilitza tant en els circuits de potència com de control amb la finalitat de controlar el comportament del motor.
Avui en dia, amb l’aparició d’elements de control electrònics, ha sigut substituït als circuits de control per variadors de freqüència. No obstant això, encara podem trobar-los en els circuits de potència així com en circuits de control de motors més econòmics.
Encara que el veureu amb detall al mòdul formatiu d’automatismes industrials, farem aquí una petita introducció per poder entendre el funcionament dels circuits de connexió dels motors d’inducció.
Podem dir que el contactor està format per tres parts ben diferenciades:
- Electroimant: és l’element de control dels contactes. Quan fem circular un corrent per la seva bobina, crea un camp magnètic que el fa actuar com un imant, de manera que fa commutar tots els altres contactes. Els seus borns són A1 i A2.
- Contactes principals: són els contactes de potència, per tant, el motor es connectarà directament a ells. En corrent continu (o en altern monofàsic) existeixen dos contactes que s’obren i tanquen a la vegada, un per al viu i l’altre per a la massa. Els seus borns són 1 i 2 i 3 i 4, de manera que quan s’acciona l’electroimant, es posen en contacte els borns 1-2 i 3-4.
- Contactes auxiliars: són contactes que s’utilitzen per als circuits de control. Igual que els contactes principals, no són més que interruptors que commuten quan s’actua sobre l’electroimant i que tornen a la seva posició de repòs quan es deixa d’actuar. En aquest cas, els borns porten dos números: un que ens diu el número de contacte, i l’altre que ens diu si és normalment obert o normalment tancat. 1-2 ens diu que el contacte és normalment tancat, mentre que 3-4 ens diu que normalment obert. Per exemple, un parell de contactes auxiliars 11-12 ens diu que el primer contacte auxiliar és NT, mentre que 23-24 ens diu que el segon contacte auxiliar és NO.
Normalment obert (NO) vol dir que en condicions de repòs l’interruptor està obert i no hi ha contacte entre els terminals. Al contrari, normalment tancat (NT, NC en castellà i anglès) vol dir que els contactes de l’interruptor estan tancats en condicions de repòs.
Els contactors es denominen KMx, on x és el número de contactor en el circuit. A la figura podeu veure el símbol utilitzat per als contactors.

Esquema d'inversió de gir
A l’esquema de la figura podeu veure l’esquema de la inversió de gir d’un motor de corrent continu realitzat amb contactors.
En els esquemes d’automatismes normalment trobareu dos subcircuits: el de potència, que s’encarrega d’alimentar directament la màquina, i el de control, que s’encarrega de processar els senyals de l’operari i controlar el comportament del circuit de potència.
En el circuit de la figura podeu observar que tenim a l’esquerra el circuit de potència, que s’encarregarà d’alimentar el motor, i el circuit de control, que controlarà el de potència.
El control d’aquest tipus de circuits es realitza per mitjà dels contactors.
En el nostre circuit disposem de tres contactors, KM1, KM2 i KM3. El comportament dels contactes d’aquests contactors es fa a través de les seves bobines, que estan marcades amb els contactes A1 i A2.
A més, en aquest circuit tenim 4 polsadors:
- -S1: polsador d’aturada
- -S2: polsador d’arrencada
- -SE: polsador de gir a l’esquerra
- -SD: polsador de gir a la dreta

A continuació seguirem una seqüència en aquest circuit i veurem com treballa.
- El primer que farem serà polsar -S2, amb el que s’alimentarà la bobina de KM1 i tots els seus contactes commutaran. Amb els contactes 1 i 2 de KM1 queda alimentada la bobina excitadora, mentre que amb els contactes 13 i 14 queda realimentat el contactor, és a dir, podem deixar anar -S2 i el contactor KM1 quedarà activat.
- Ara polsem -SE. Això fa que s’alimenti la bobina de KM2, amb el que tots els seus contactes commuten. Els contactes 1-2 i 3-4 de KM2 passen a estar tancats, amb el que ja tindrem corrent a l’induït del motor, i començarà a girar en un sentit. El contactor KM2 també queda realimentat pels seus contactes 13-14, de maner que podem deixar anar -SE i el motor encara seguirà en funcionament.
- Si ara polsem -SD no passarà res, ja que els contactes 11-12 de KM2 estan oberts i la bobina de KM3 no es pot alimentar. Per tant, per fer girar el motor hem de deixar d’alimentar KM2. O el que és el mateix, hem d’aturar el motor. D’això se’n diu inversió de gir passant per aturada.
- Per aturar el motor, accionem -S1. Deixarem d’alimentar tots els contactors i els seus contactes tornaran a la seva posició de repòs.
- Si ara volem fer que giri cap a la dreta, hem de seguir la seqüència polsar -S2 i desprès -SD.
Fixeu-vos que aquest circuit incorpora un mecanisme de seguretat amb els contactes 11-12 de KM2 i KM3, de manera que mai poden KM2 i KM3 estar activats a la vegada. Això és molt adient ja que així no es podrà alimentar el circuit a través dels contactes principals del dos contactors provocant una curtcircuit, però fa que haguem d’aturar el motor per invertir el sentit de gir.